杨金显,刘鹏威
(河南理工大学 电气工程与自动化学院,焦作 454000)
MEMS(Micro Electro Mechanical System)惯性传感器以其体积小,成本低的优势被广泛应用于石油以及天然气勘探时的钻井姿态解算中[1],实时并连续精准的获取钻具钻进时的姿态参数,是实现精准控制钻具导向并拟合出井眼轨迹的关键。
在实际钻井工程中,钻具与地下岩石层等的碰撞振动使得传感器测量数据严重失真,导致解算的姿态精度降低。目前常采用停钻测量的静态测量方式测量姿态角,这极大地降低了钻井测量的实时性和连续性[2]。薛启龙等提出井斜方位动态解算方法,针对传感器数据干扰噪声设计了硬件滤波,但仅去除固定频率噪声,并不能满足井底复杂噪声的有效去除[3]。周静等分析了干扰信号的功率谱密度,得到了振动频率与转速的大致关系,然而精确度尚待提高[4]。周琪、张荣辉等提出的基于陀螺仪的姿态解算方法需要用到GPS修正,不适用井下复杂狭小的环境[5,6]。文献[7]提出了一种采用卡尔曼滤波的新状态空间法连续实时测量钻井轨迹,针对旋转导向钻井和自动垂直钻井建立一套捷联测量系统,采用卡尔曼滤波估计系统状态,但是该方法没有考虑传感器信号中包含的大量振动加速度[7]。贾培刚等人设计了基于卡尔曼滤波的加速度计运动补偿,然而钻具在地下的高振动状态,仅使用卡尔曼滤波方法可能会导致滤波发散[8]。王小旭等基于假设条件(状态变量同观测噪声无关)下提出非线性系统有色噪声的无迹卡尔曼滤波方法,将有色量测噪声转化为白噪声,然而对于实际情况下的滤波过程并不适用[9]。
在前人所做的研究基础上,针对钻具振动导致姿态测量精度降低的问题,提出利用小波神经网络与自适应卡尔曼滤波相结合的方法联合校正钻具姿态角。一方面根据量测信息与状态估计选取合适的自适应因子,减小状态模型误差,提高姿态解算精度;
另一方面当出现振动时,通过误差对比联合校正小波神经网络,输出补偿值,实现反馈校正。实验结果表明,所提方法估计的姿态角误差较小,为工程应用提供理论依据。
1.1 坐标系定义
为了描述钻具在地下空间中的姿态,通常建立载体坐标系(b系)和地理坐标系(n系)。其中,地理坐标系选择北-东-地(O-NED),分别指向正北,正东和重力加速度方向;
载体坐标系(O-XYZ)中Z轴指向钻具轴线方向,Y轴指向钻具造斜方向,X轴与Y轴在同一平面内且与Z轴互相垂直,满足右手坐标系定理。
1.2 钻具姿态角定义
根据导航理论中的欧拉定理与上述建立的坐标系,钻具姿态角如图1所示,方位角φ表示钻具运动方向在水平面H的投影,是磁北极与钻具轴线在水平面内投影之间的夹角;
井斜角θ表示钻具运动方向以水平面为参考时的倾斜程度,是水平面与钻具轴线之间的夹角;
工具面向角γ表示钻具钻进时下一步的造斜方向,是钻具的造斜方向与参考方向V之间的夹角[3,4]。
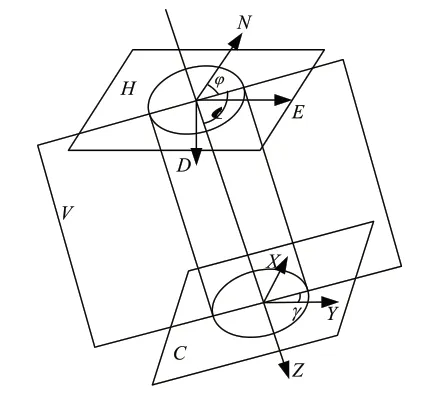
图1 钻具姿态角的定义
由欧拉定理可知,当钻具处在地下空间任一姿态时,都可由n系依次绕不同轴经过三次旋转得到。具体旋转变换如图2所示。首先,将O-NED坐标系绕D轴旋转φ角,得到X1Y1D坐标系;
然后再将X1Y1D坐标系绕Y1轴旋转θ角,得到XY1Z1坐标系;
最后再把XY1Z1坐标系绕X轴旋转γ角,便得到钻具当前的姿态坐标系O-XYZ[10]。

图2 坐标系旋转变换
对于上述的每一次旋转,都可由旋转变换矩阵Rφ、Rθ、θγ表示,三个矩阵相乘便可以得到地理坐标系(n系)到载体坐标系(b系)的姿态转换矩阵的表达式为[11]:

2.1 姿态解算原理
根据姿态转换矩阵可知加速度计测量值与当地重力加速度关系为:

整理可得:

求解式(4)可得井斜角和工具面角:

同理,根据姿态转换矩阵可知磁强计测量值与当地磁场强度关系为:

式(6)中,m0为当地地磁场强度,β为地磁方向与磁北方向的磁倾角夹角。
将姿态转换矩阵和式(5)代入式(6),可得钻具方位角φ的计算公式:

在没有干扰时,可由加速度计和磁强计的测量值根据式(5)和式(7)计算得到。然而,当钻具在工作时,钻具的旋转以及钻头、地层与钻杆联合作用破岩时牙轮牙齿产生的啮合振动使得钻具姿态测量信息失真,这就需要通过数据处理滤除干扰,以期获得更加准确的姿态角[12,13]。
2.2 钻速补偿
由2.1节可知,当钻具静态时,很容易就能计算出钻具的姿态角。当钻具剧烈旋转时,加速度计除了敏感到重力加速度的分量外,还会敏感到旋转加速度和振动加速度,假设三者可以线性叠加,当钻井工具以钻速ω旋转钻进时,可以得到加速度计X轴和Y轴的输出为:

式中:Vax,Vay为理想状态下加速度计X轴,Y轴的输出。Vrx为X轴附加的切向加速度信号,其大小正比于钻具转速的变化率;
Vry为Y轴附加的离心加速度信号,其大小正比于钻具转速的平方,R为惯性加速度计到钻具旋转中心的距离。Ax、Ay为附加的振动加速度信号。当获得钻速ω时,可通过转速补偿公式式消除旋转加速度的影响。
2.3 WNN-AKF原理
针对钻进过程中的振动加速度,由于振动的随机性,无法准确测得,可以将振动干扰作为高斯白噪声,通过建立自适应卡尔曼滤波方法估计姿态角;
然后根据滤波器的输入输出建立小波神经神经网络对姿态数据进行寻优,并在线估计出姿态误差进行反馈控制输出;
当外界钻具突然振动加剧,通过反馈调节滤波器输出,减小振动对姿态的影响。小波神经网络和自适应滤波组合原理如图3所示。

图3 WNN-AKF原理
2.3.1 小波神经网络原理
小波神经网络是一种基于小波分析理论的神经网络模型。它充分利用了小波变换更好的定位特性,同时结合神经网络的自学习能力,具有较强的逼近能力。与BP网络相比,网络使用的基函数是正交小波基,权值之间的相关冗余较小,某一权值的训练不影响其他权值,收敛速度较高。此外,小波网络是一种易于适应新数据,可以避免较大外推误差的局部逼近网络,而且其结构也简单,可调参数最少,有利于缩短训练时间。
小波神经网络为3层神经网络,输入层为并行输入,隐藏层和输出层包含神经元。小波神经网络的结构如图4所示[14]。

图4 小波神经网络模型
通过网络学习,可以训练小波函数的尺度参数a和平移参数b。图中隐藏层神经元的激发函数f1是莫雷小波函数,表示为:

隐含层输出为:

式中:O为隐含层的输出,x为输入层的输入;
w为权值;
h为Morlet小波函数
输出层的输出为:

2.3.2 自适应卡尔曼滤波原理
根据钻具姿态解算方法,建立钻具姿态状态空间模型:

式中:Xk=[φ θ γ]T为钻具姿态角,为状态转移矩阵,系统噪声wk和量测噪声vk为均值为零的高斯白噪声序列。为钻具姿态量测信息,Hk为量测矩阵,ya为三轴加速度计量测时的输出数据矩阵,ym为三轴磁强计量测时的输出数据矩阵。
根据式(14),设在某一k时刻,系统状态预测向量为:

假设残差方程和预测的残差方程为:


式中:Kk为增益矩阵。
为了平衡观测和预测状态对估计状态参数的影响,将自适应因子αk设置为分段递减函数:

式中:c0∈(1,1.5),c1∈(3,8),ΔXk表达式如下:

从上式不难看出,自适应因子作用于整个预测状态向量的协方差矩阵,而不是模型误差的协方差矩阵,或前一时刻估计状态向量的协方差矩阵,可以有效地控制观测噪声和状态模型噪声对姿态参数估计的影响,提高钻具姿态的估计精度。
3.1 振动台实验及分析
为验证所提算法效果,在实验室利用振动台进行振动实验。实验室地理条件为北纬35.15°,东经113.08°,地球重力加速度为9.8m/s2。图5为实验室自制的钻具姿态测量单元,包含MEMS加速度计、磁强计,以及姿态解算处理器,同时测量单元通过蓝牙接口实时传输数据至计算机,通过我们设计的方法对数据进行处理。

图5 姿态测量单元
如图6所示,将姿态测量单元以某一角度固定在振动台上,使其可以完全跟随振动台同步振动。实验开始前,采集60s静止数据,解算并作均值处理得到当前测量模块的姿态角,可以作为姿态真值与后续动态解算的姿态角进行对比。开始实验,设置振动台频率为扫频模式,频率范围设置为10Hz至100Hz,振动方式为上下-左右-前后模式,设定振动时间为10min,将数据送到所提算法中进行滤波处理,得到振动时的实时姿态角。与真实姿态角作差得到实时解算姿态角的估计误差。文中取部分数据得到姿态角误差曲线如图7、图8所示。

图6 振动台实验

图7 振动台实验方位角误差

图8 振动台实验倾斜角误差
从图7和图8中可以看出,振动台实验时,由于存在大量振动,导致加速度计信号失真,使得未经滤波处理直接解算的姿态角与真实姿态角误差较大,分别经过文中所提方法以及自适应滤波方法进行处理后,所提方法得到的姿态角误差明显减小,方位角误差降低到±0.5°左右,井斜角误差降低到±0.3°左右,具有更好的滤波效果,有效的降低了振动对姿态解算时的影响。
3.2 钻进实验及分析
为进一步验证所提算法的性能,在实验室条件下,采用小型钻进样机进行钻井实验。如图9所示,将姿态测量模块固定在钻杆上,调整钻杆为垂直钻进,静止采集60s数据解算钻具姿态角,对解算的姿态角作均值处理作为钻具姿态真值。调整钻速为60r/min,持续钻进10min并将采集的数据送入算法进行滤波处理,得到经过滤波算法处理后的钻具动态姿态角,与姿态角真值作差得到姿态角估计误差。

图9 钻进实验
取钻具强烈振动时的部分实验数据,经过两种滤波方法处理后井斜角误差曲线对比图如图10所示。经过文中设计方法进行滤波处理后,通过对比可以看出得到的井斜角角曲线比较平滑,其中井斜角误差控制在±1.8°左右,而仅仅通过自适应滤波后的井斜角误差甚至增加到了6°,结果表明文中所提方法效果较好,误差控制的更小,曲线也更加平滑,减小了钻杆振动对钻具姿态解算的影响。

图10 钻进实验井斜角误差
针对钻井时钻杆振动导致钻具姿态测量失真的问题,提出了利用自适应滤波的输入输出构建小波神经网络的方法对钻具姿态进行估计,分别设计振动台实验以及模拟钻进实验对所提方法进行验证,结果表明,所提方法得到的姿态角误差优于传统自适应卡尔曼滤波方法,减小了振动对姿态解算的影响,提高了钻具姿态动态姿态测量的精度,为实际钻井提供理论依据。
猜你喜欢 振动台钻具姿态 基于振动台试验的通信机柜地震易损性分析哈尔滨工业大学学报(2022年5期)2022-04-19新疆玛湖油田水平井低摩阻导向钻具组合优选与应用矿产勘查(2020年5期)2020-12-25攀爬的姿态学生天地(2020年3期)2020-08-25全新一代宋的新姿态汽车观察(2018年9期)2018-10-23跑与走的姿态中国自行车(2018年8期)2018-09-26国外潜孔钻具研发方面的新动向凿岩机械气动工具(2016年1期)2016-11-11低钻速钻井作业中钻具的损伤危害与防护化工设计通讯(2016年7期)2016-03-12旋挖钻机钻具产品类型凿岩机械气动工具(2015年3期)2015-11-11大型液压离心振动台控制策略的仿真研究振动工程学报(2015年1期)2015-03-01420 kV避雷器振动台抗震试验噪声与振动控制(2015年4期)2015-01-01