李佳耀,刘 碧,夏文婧,宋文胜
(西南交通大学电气工程学院,成都 611756)
永磁同步电机PMSM(permanent magnet synchronous machine)具有体积小、重量轻、功率密度高等优点,广泛应用于各种交流传动系统中[1-2]。目前,高性能永磁同步电机控制技术主要包括矢量控制与直接转矩控制。矢量控制以其较好的稳态控制性能得到了应用与推广,但其控制性能依赖于内环PI 控制器,而PI 参数的调节与整定较为复杂[3]。直接转矩控制具有结构简单、动态响应快、无需坐标变换等优点,成为工业界和学术界的研究热点[4-6]。
模型预测控制MPC(model predictive control)由于动态响应快、易于考虑系统非线性约束、控制灵活等特点,近年来受到广泛关注[7-10]。国内外学者将模型预测理论与直接转矩控制结合,提出了永磁同步电机模型预测转矩控制MPTC(model predictive torque control)算法[11]。
传统MPTC 算法以电磁转矩和定子磁链幅值作为控制目标,由于其量纲不同,需要合理设计权重因子以实现对转矩和磁链的同时控制。然而,目前尚无成熟的权重因子整定理论,在实际应用中权重因子的设计多以反复尝试和调整为主。为了解决权重因子整定问题,国内外学者做了大量研究。文献[12]构建了转矩和磁链两个目标函数,计算所有电压矢量下的目标函数值并对其排序,选择使两个目标函数综合指标最小的电压矢量作为最优矢量。该方法虽然避免了权重因子整定,但增加了算法的计算量;
文献[13]采用电压矢量作用时间表征电磁转矩和定子磁链,消除了目标函数权重因子,但设计过程较为复杂;
文献[14]通过推导电压矢量与转矩和磁链的关系,构建电压代价函数取代传统转矩与磁链代价函数,选取与参考电压误差最小的矢量为最优矢量,有效解决了权重因子整定问题,但未对系统稳态性能的优化做进一步研究;
文献[15]以异步电机为研究对象,将定子磁链幅值和电磁转矩的控制转换为对定子磁链矢量的控制,有效消除了权重因子,但仍需要对所有矢量进行遍历寻优,计算量较大。另一方面,传统MPTC 算法在一个控制周期内只采用一个电压矢量,且电压矢量方向和幅值固定,导致系统产生较大的电磁转矩脉动。文献[16]针对异步电机,以转矩脉动最小化原则在线优化权重因子,有效减小了电机转矩脉动,但计算量较大;
文献[17]通过增加预测时域来提高系统的稳态性能,然而随着预测步数的增加,算法计算量也随之增加;
文献[18-20]提出了基于占空比优化的模型预测转矩控制方法,在一个采样周期中通过加入零矢量调节有效矢量的作用时间,但待选电压矢量仅幅值可调,系统的稳态性能改善效果有限;
文献[21-22]在一个控制周期中作用两个电压矢量,且第二个电压矢量不局限于零矢量,从而有效扩大了矢量覆盖范围,改善了系统的稳态性能。
针对传统MPTC 算法中存在的权重因子难以设计、计算量大、转矩脉动大等问题,借鉴文献[15]中异步电机的控制思想,结合开关序列概念,提出一种基于开关序列的永磁同步电机模型预测磁链控制。首先,通过解析电磁转矩与定子磁链的关系,将控制目标等效转换为对d、q 轴磁链的控制,有效消除了权重因子;
其次,采用定子磁链无差拍预测控制计算所需的参考电压矢量,根据其所在扇区确定待选开关序列,无需进行多次遍历寻优,有效减小了计算量;
然后,针对传统MPTC 算法中转矩脉动大的缺点,根据磁链无差拍原则计算开关序列中基本矢量的作用时间,从而实现对定子磁链的准确跟踪。最后,在PMSM 实验平台上对传统MPTC 方法和所提出的算法进行对比。
本文以表贴式PMSM 为研究对象,假设磁路不饱和,反电动势为正弦,不计磁滞和涡流损耗影响,永磁同步电机在dq 旋转坐标系下的电流方程为

磁链方程为

电磁转矩方程为

式中:ud、uq、id、iq、ψd、ψq分别为d、q 轴定子电压、定子电流与定子磁链;
Ld、Lq为d、q 轴电感;
R 为定子相电阻;
ωe为转子电角速度;
ψf为永磁体磁链;
Te为电磁转矩;
np为磁极对数。
采用一阶前向欧拉公式将式(1)离散化,可得PMSM 电流预测模型为

式中:Ts为采样周期;
ωe(k)为k 时刻的转子电角速度;
id(k)、iq(k)、ud(k)、uq(k)及Ed(k)、Eq(k)分别为k时刻d、q 轴电流、电压及反电动势;
id(k+1)和iq(k+1)分别为k+1 时刻的d、q 轴电流。
根据式(2)可得PMSM 磁链预测模型为

针对传统MPTC 算法中存在的权重因子难以设计、计算量大、转矩脉动大等问题,本文提出了一种基于开关序列的永磁同步电机模型预测磁链控制算法。
2.1 控制目标的转换
在传统的模型预测转矩控制算法中,目标函数可以表示为

图1 为两相坐标系下的永磁同步电机磁链矢量。图1 中,d、q 轴坐标系以转子电角速度ωe逆时针旋转,θ 为转子位置角,定子磁链ψs与转子磁链ψf的夹角δ 为负载角。

图1 两相坐标系下的永磁同步电机磁链矢量Fig.1 Flux vectors of PMSM under two-phase coordinate frame
根据式(2)~式(3),电机的电磁转矩可以表示为

由式(8)可知,电磁转矩Te由定子磁链幅值|ψs|及负载角δ 决定。当|ψs|恒定时,Te与sin δ 成正比。因此可将对转矩和磁链幅值的控制,转换为对磁链幅值和负载角的控制。电磁转矩参考值可以表示为

由式(9)~式(10)可得

其中,

由式(11)可知,通过控制d、q 轴磁链即可实现对转矩和磁链给定值的跟踪。
2.2 开关序列设计
三相逆变器基本电压矢量如图2 所示,在三相逆变器中共有8 个基本电压矢量,包括6 个有效矢量(u1~u6)和2 个零矢量(u0,u7)。开关序列设计遵循以下原则:

图2 三相逆变器基本电压矢量Fig.2 Basic voltage vectors of three-phase inverter
(1)每个扇区对应一个开关序列;
(2)所有开关序列由零矢量u0及与其相邻的两个有效矢量构成;
(3)所有开关序列中矢量对称排布,且相邻矢量间只有一相开关动作;
(4)所有开关序列以零矢量u0作为为首尾矢量,保证相邻开关序列之间不会发生矢量切换。
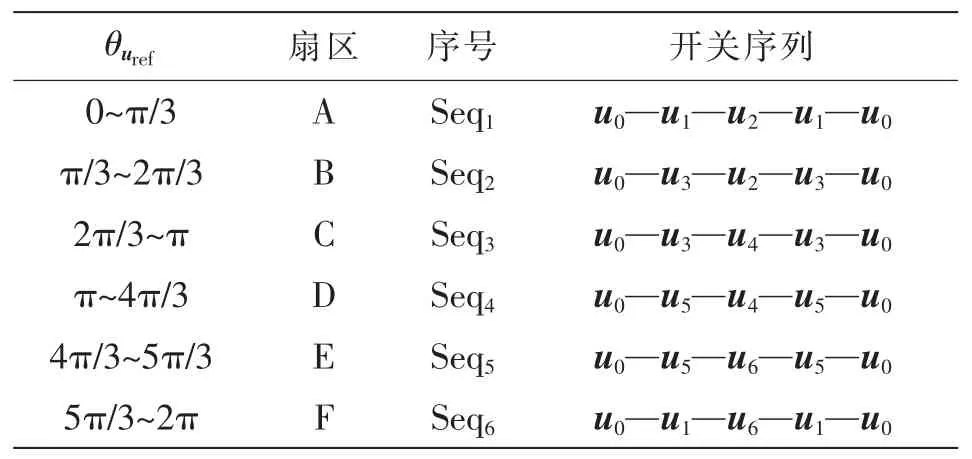
表1 开关序列设计Tab.1 Design of switching sequence
2.3 开关序列选择
利用d、q 轴定子磁链无差拍预测控制,可求解出在k 时刻所需施加的电压矢量ud(k)和uq(k),进一步可得参考电压矢量uref的角度,由表1 可选择对应的开关序列。
由式(4)~式(6)可得d、q 轴定子磁链预测模型为
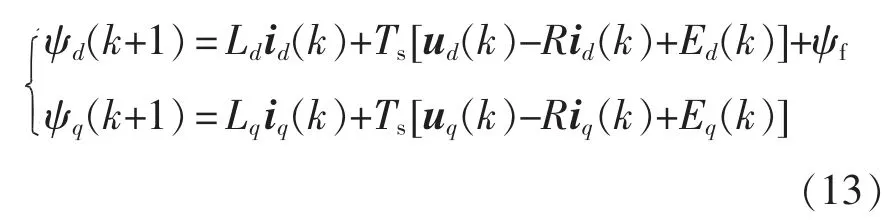
磁链无差拍预测控制的目标就是保证d、q 轴定子磁链的预测值在一个采样周期结束时等于其给定值,根据式(13)可得

由式(11)和式(14)可计算出k 时刻所需施加的电压矢量ud(k)和uq(k),将其转换至两相静止坐标系下,可得uα(k)和uβ(k),则k 时刻的参考电压矢量uref的角度为

根据k 时刻的参考电压矢量uref的角度,即可判断出参考电压矢量uref所在扇区,从而由表1 得到对应的开关序列。
2.4 基本矢量作用时间求解
在选定k 时刻应采用的开关序列之后,根据d、q 轴磁链无差拍控制原则,计算出该开关序列下各基本电压矢量的最优作用时间。图3 给出了一个控制周期Ts内各基本电压矢量的作用过程,V0、V1、V2分别代表一个开关序列中的零矢量、第一有效矢量和第二有效矢量,t0、t1、t2分别代表各矢量的作用时间。
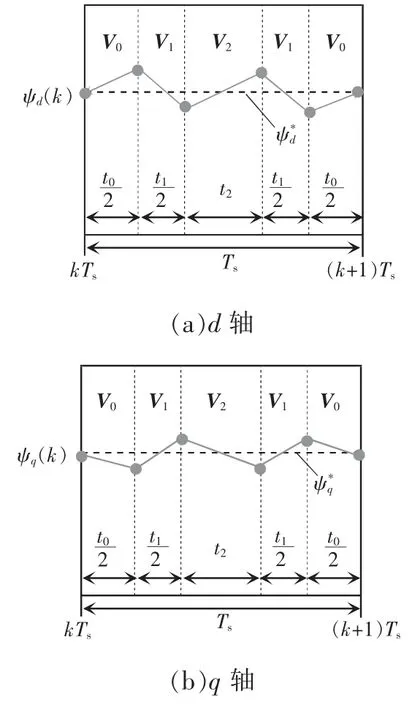
图3 控制周期Ts 内开关序列中各基本矢量作用过程Fig.3 Action process of each basic vector in switching sequence during the control period Ts
根据d、q 轴磁链无差拍控制原理,结合图3 可得

式中:sd0、sq0、sd1、sq1、sd2、sq2分别为V0、V1、V2作用时d、q 轴磁链变化率。
d、q 轴磁链变化率表示为

结合式(1)和式(17)可得各矢量作用下的磁链变化率为

式中,Vdi、Vqi(i=0,1,2)分别为各电压矢量的d、q 轴分量。
由式(19)~式(22)可得t0、t1、t2分别为

其中,

由式(19)~式(22)计算出的基本矢量作用时间有可能会超出0~Ts的范围。因此,应将其限制在0~Ts内。对t1和t2进行修正后,若仍存在t1+t2>Ts,则进行时间分配,即

2.5 MPFC-SS 算法的实现
MPFC-SS 算法示意如图4 所示,主要包括以下6 个步骤。

图4 MPFC-SS 算法示意Fig.4 Schematic of MPFC-SS algorithm
(1)利用光电编码器,采集得到电机的速度及转子角度信息,同时采样k 时刻的三相电流,转换至d、q 旋转坐标系下;
(3)由式(11)~式(12)计算出d、q 轴定子磁链参考值;
(4)由式(14)~式(15)计算参考电压矢量uref的位置角,查表1 选择对应开关序列;
(5)由式(18)~式(23)求解所选开关序列中基本矢量的最优作用时间,并对其进行修正;
(6)结合对应开关序列及基本矢量作用时间,产生脉冲信号作用于逆变器。
本文搭建了基于TI 数字处理器TMS320F28335的PMSM 实验系统,如图5 所示,永磁同步电机参数如表2 所示。文中对MPTC 及MPFC-SS 算法进行对比实验,其中MPTC 算法控制频率为20 kHz,MPFCSS 算法控制频率为10 kHz。
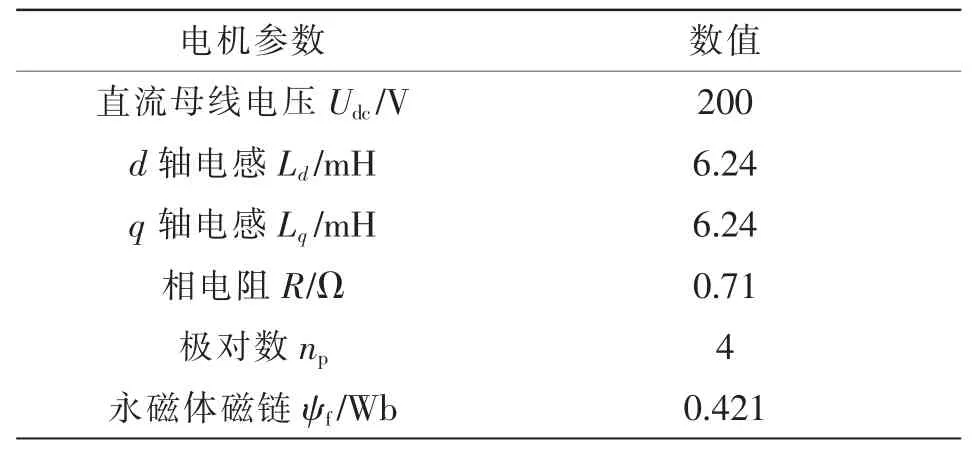
表2 永磁同步电机参数Tab.2 Parameters of PMSM

图5 PMSM 实验系统Fig.5 Experimental system of PMSM
3.1 稳态性能研究
图6、图7 分别给出了传统MPTC 和MPFC-SS算法的稳态实验波形。其中,电机给定转速为600 r/min,负载转矩为16 N·m。实验中两种算法的速度环PI 参数相同,Kp=0.05,Ki=0.25。图6(a)为采用传统MPTC 算法时电机转速、转矩及定子电流波形,图6(b)和图6(c)为对应的定子电流细节图及谐波分析结果,定子电流THD 为9.38%。图7(a)为采用MPFC-SS 算法时电机转速、转矩及定子电流波形,图7(b)和图7(c)为对应的定子电流细节图及谐波分析结果,定子电流THD 为2.86%。由图6、图7 可知,MPFC-SS 算法可以有效减小电机转矩脉动及定子电流谐波。

图6 传统MPTC 下稳态实验波形Fig.6 Experimental waveforms under traditional MPTC in steady-state

图7 MPFC-SS 下稳态实验波形Fig.7 Experimental waveforms under MPFC-SS in steady-state
3.2 动态性能研究
为了验证所提MPFC-SS 算法的动态响应性能,本文进行了转矩及转速突变实验。图8 为电机转矩突变时所提算法的实验波形,其中电机转速为600 r/min,负载转矩由0 突变至12 N·m。由图8 可知,转矩突变时,电机转速有小幅下降,但能快速跟踪至指定值。图9 为电机转速突变时的实验波形,其中电机负载转矩为16 N·m,给定转速由200 突变至600 r/min。由图9 可知,转速突变时,所提算法可以实现转速快速跟踪且无超调,具有良好的动态响应性能。

图8 电机转矩突变波形Fig.8 Waveforms with step change in motor torque
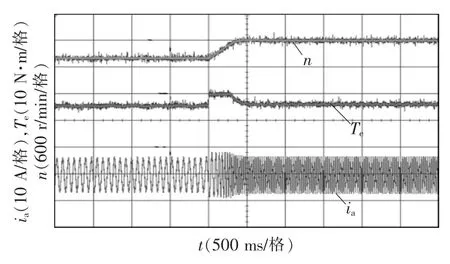
图9 电机转速突变波形Fig.9 Waveforms with step change in motor speed
3.3 算法程序运行时间对比
图10 为传统MPTC 及MPFC-SS 算法运行时间的对比结果。其中波形的上升沿表示算法开始执行,下降沿表示算法结束执行。传统MPTC 算法的控制频率为20 kHz,控制周期为50 μs;
所提MPFCSS 算法控制频率为10 kHz,控制周期为100 μs。由图10 可知,传统MPTC 和所提MPFC-SS 算法代码在DSP 中的运行时间分别为32.4 和22.2 μs,MPFC-SS算法可以有效减小计算量。

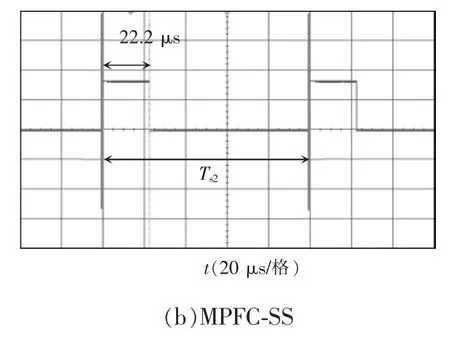
图10 2 种算法程序运行时间对比结果Fig.10 Result of comparison of program running time between two algorithms
表3 为2 种控制算法的各项性能指标对比。结果表明,MPFC-SS 算法能在较低的控制频率下实现更优的电流及转矩控制性能,且减小了算法的计算量。
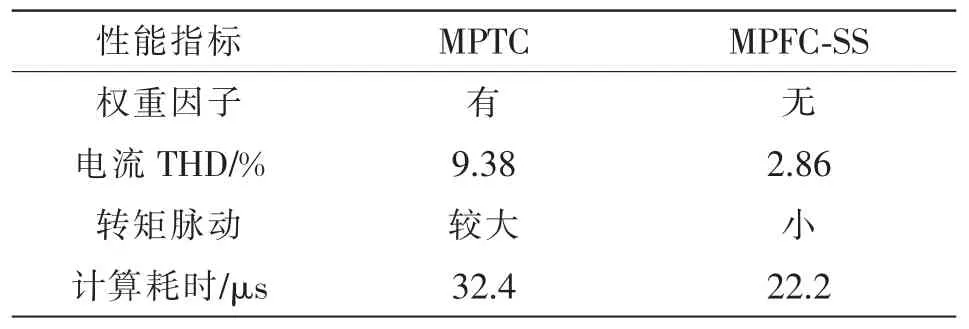
表3 2 控制算法综合性能对比Tab.3 Comparison of comprehensive performance between two control algorithms
永磁同步电机传统MPTC 算法中存在权重因子难以设计、计算量大、转矩脉动大等问题。本文提出一种基于开关序列的模型预测磁链控制算法,具有以下优点:
(1)通过分析电磁转矩和定子磁链的关系,将传统MPTC 中对电磁转矩和磁链幅值的控制转化为对d、q 轴定子磁链的控制,避免了权重因子整定的过程;
(2)计算参考电压矢量的相角值,从而快速定位至对应扇区,确定对应的开关序列,避免了对所有电压矢量进行遍历寻优的过程,有效减小了计算量;
(3)根据磁链无差拍控制原则,计算待选开关序列中基本矢量的作用时间,有效降低了转矩脉动和电流谐波,提高了电机稳态控制性能。
猜你喜欢 同步电机定子永磁 大型定子公路运输移位技术探讨时代汽车(2022年19期)2022-10-18三相异步电动机定子绕组局部烧毁故障原因分析防爆电机(2022年3期)2022-06-17浅谈变频永磁直驱电动机在空冷岛上的应用前景防爆电机(2022年3期)2022-06-17永磁同步电动机弱磁控制策略的研究与仿真防爆电机(2022年3期)2022-06-17高寒条件下空冷岛变频永磁直驱改造及应用防爆电机(2022年3期)2022-06-17一种抑制半直驱永磁风力发电机短路转矩的方法防爆电机(2022年3期)2022-06-17大功率同步电机转子设计防爆电机(2022年3期)2022-06-17永磁同步电机齿槽转矩的优化分析防爆电机(2022年2期)2022-04-26高速永磁同步电机电气性能的优化设计防爆电机(2022年2期)2022-04-26水轮发电机定子线棒电晕腐蚀分析及处理科学家(2022年3期)2022-04-11