孙盼,吴旭升,蔡进,杨刚,周航,谢海浪,张筱琛
(海军工程大学 电气工程学院,湖北,武汉 430033)
无线电能传输具有供电安全、可靠、便捷和隐 蔽等优点,是当前船舶无线电能传输关注的重点[1-2].由于无线电能传输能够快速部署,对于停靠时间短、充供电功率需求很高的船舶具有很强的应用价值[3-6]. 舰船无线供电的功率需求达到几百千瓦甚至数十兆瓦[7],对传输拓扑结构、发送端功率均衡、接收端功率集成等提出了挑战. 由于半导体制造工艺等限制,单个感应式无线电能传输系统的功率容量不能够无限制的提升,采用模块化多通道设计可以实现功率叠加,提高系统的模块化和供电可靠性水平.
大多数文献采用发送端逆变器并联的方法来提升功率[5,8-10],此外还有发射线圈并联[11]、多发射线圈对一个接收线圈方案[12]、输入并联输出串联方案[13],以上研究成果各有特色,既有单通道功率提升方案,也有多通道输出串联功率提升方法. 然而,无论是单通道的局部功率提升方案,还是多通道接收侧串联方案,串并联模块的增减均会导致系统原有运行模式的变化,系统均不能实现简单的模块化叠加,这也成为制约当前无线电能传输系统大功率传输的关键技术问题之一.
本文采用发送端和接收端均并联的多通道无线岸电系统,由于模块的输入输出电压与系统的输入输出电压是相等的,因此无论模块投入还是切除,系统的电压均可以保持不变,为此该并联系统可通过简单的模块化叠加实现大功率电能传输,解决单通道功率受限问题.
然而,通道参数差异及参数扰动易造成系统输出不稳定[14-16],尤其是耦合器、负载等参数变化后系统的输出特性将趋于改变,单通道感应式电能传输(inductive power transfer, IPT)系统的闭环控制相对容易,然而三通道IPT 系统的建模将变得困难,尤其是系统阶数太高,使得控制器设计困难很大[17-18],需要开展降阶研究. 本文首先建立了多通道并联无线岸电系统模型,采用能量-相角方法降低系统阶数以建立系统小信号模型,简化系统控制器设计难度,基于Trapezoidal 阶梯双线性逼近法设计了系统控制器,仿真结果证明了控制策略的正确性和有效性.
采用的多通道无线电能传输拓扑如图1 所示.

图1 无线岸电系统拓扑示意图Fig. 1 wireless shore power system topology schematic
图1 中VI为 直流输入电压,CD1,CD2,CDn是与各逆变器并联的分压电容,其电压分别为VD1,VD2,VDn. 无线电能传输由n个传输通道组成,每个传输通道包括发送端线圈LPi及 接收端线圈LSi, 相应的补偿电容为CPi和CSi.VO为 系统直流输出电压,Ioi分别为某一通道的直流输出电流;
RL为 全系统的负载电阻,Reqi为某一通道全桥式整流器与负载的等效电阻,RSi和RPi分别为发射线圈与接收线圈总等效电阻;
LPi、LSi、CPi、CSi为谐振网络电容和电感. 由于舰船侧面或甲板面积较大,同侧线圈的布置间距较大,可假定多个通道的发射线圈之间无互感,接收线圈之间也没有互感. 列出图1 在频域下的方程,有


式(1)模型阶数较大而难以实现,目前主流的近似方法中有主极点法、pade 近似法、脉冲响应时间矩匹配法、劳斯近似法等. 其中,主极点法是将传递函数展开成部分分式,保留最靠近虚轴的所谓“主导”极点,而舍去那些离开虚轴较远的极点. 此方法要通过特征方程求根确定极点,而近似的性能不甚明朗.而pade 近似法是使原传递函数和近似传递函数的泰勒展开式在一定的项数上一致,近似式的极点要由原传递函数的分母和分子式来确定,但是这样就可能使稳定的系统出现不稳定的近似. 为此,采用能量-相角的方法求解模型,该方法通过将谐振网络中的电流和电压转化为能量和相角,实现了系统模型的转换.

相对于谐振电流和谐振电压,接收端负载电压的平均值是一个缓慢的变量,因此可通过对式(9)方程在一个周期内积分得到其平均值,从而建立多通道无线岸电系统大信号模型

由于大信号平均模型仍是非线性的,在进行线性控制器设计时,需要获得模型在状态空间的线性小信号模型. 将状态变量及输入量化为稳定量和小扰动量,代入式(10)然后分离出稳定方程和小扰动方程,即可得到系统的小信号模型

小信号模型的建立可以将非线性器件经过线性化处理. 式(11)中的处理方法不仅保留了静态工作点附近原系统的动态特性,同时简化了系统方程的建立,便于后续研究工作. 为保证小信号输入有足够的变化范围并使系统负载电压尽量大,选择满占空比的0.2 倍作为平衡点 α¯.
按照实际船舶岸电需求,设计缩比无线岸电样机,缩比样机功率15 kW,相应的负载参数、谐振网络参数按照15 kW 的SS 型IPT 系统拓扑来设计,设计结果见表1.

表1 三通道无线电能传输系统仿真参数Tab. 1 Three-channel wireless power transfer system simulation parameters
利用Matlab 可以将式(11)描述的状态空间表达 式转化为系统开环传递函数

为了满足无线电能传输系统的实际应用,需要对式(12)模型进行离散化以设计数字控制器,测量应在谐振电流随频率变化保持相对稳定后进行. 因此针对船电系统选择并确定合适的采样时间TS.
利用Matlab 在零阶保持状态下,得到了1 /TS采样频率下的离散化模型

根据式(13)幅频特性曲线很容易得知该系统在没有控制器作用下是不稳定的,为了使单相全桥逆变电路无线电能传输系统负载功率可控,必须设计一个合理的离散控制器. 具体控制过程可分为以下几个步骤:
①当有扰动(即给定值扰动和负载扰动)影响系统输出时,通过模拟采样的零阶保持器对系统输出进行离散化,然后通过无线传输的形式将信号传递到系统的接收端.
②比较器将输出与预期值进行比较,得到预期值与实际输出的偏差. 同时,离散控制器实时计算新的输入量.
③新输入通过改变相移角使全桥逆变器的输出电压发生变化,即无线电能传输系统发送端谐振网络的输入电压驱动谐振网络输出电压与参考电压之间的偏差,从而实现负载电压与预期电压的控制跟踪.
为保证式(13)离散化系统的频域特性与式(12)对应的连续时间系统保持一致,采用Trapezoidal 阶梯双线性逼近法构造PI 控制器



图2 理想情况下采用PI 控制器的系统性能Fig. 2 The ideal system performance with a PI controller
无线电能传输系统的参数扰动通常来源于3 部分:系统输入直流电压扰动、谐振网络参数扰动、负载扰动. 其中,负载变化是最常见的,一般的系统均工作在变负载工况;
系统输入直流电压在市电供应下是相对稳定的,但在小型独立供电平台供电、蓄电池供电时易产生电压波动,尤其是蓄电池端电压会随充放电状态改变;
谐振网络的固有参数受到温度、运行状态和器件老化的影响,易产生参数漂移,含有铁芯的耦合器电感量还随位置变化而变化. 因此在仿真实验中,需要根据船用无线岸电系统实际工况来设定扰动的范围.
为了验证无线岸电系统对各种外界扰动的控制效果,建立Matlab 仿真系统如图3 所示. 系统额定功率15 kW,额定输入直流电压500 V. 根据供电电源端电压变化范围及应用实际,设定输入直流电压扰动范围定为±20%;
系统额定功率15 kW,负载功率切换范围一般不超过30%,因此将系统功率扰动范围定为5 kW.

图3 无线岸电系统Matlab 仿真模型Fig. 3 Matlab simulation model of wireless shore power system
4.1 多通道参数差异下控制器性能仿真
在选定PI 控制器后,为进一步验证其性能,对无线岸电系统3 个通道的通道参数重新选定,通道3保持参数不变,通道1 和通道2 参数微调,其调节范围控制在5%以内. 对比分析控制器调节效果,通道参数变化如表2,仿真结果如图4.

表2 某通道参数变化Tab. 2 A channel parameter change
从图4 中可以看出,通道参数的改变对控制器调节效果会产生小幅影响,但控制器响应较快、调节效果良好,在实际系统中,通道参数可能存在略微差异的情况下系统具有较好的自适应调节效果.
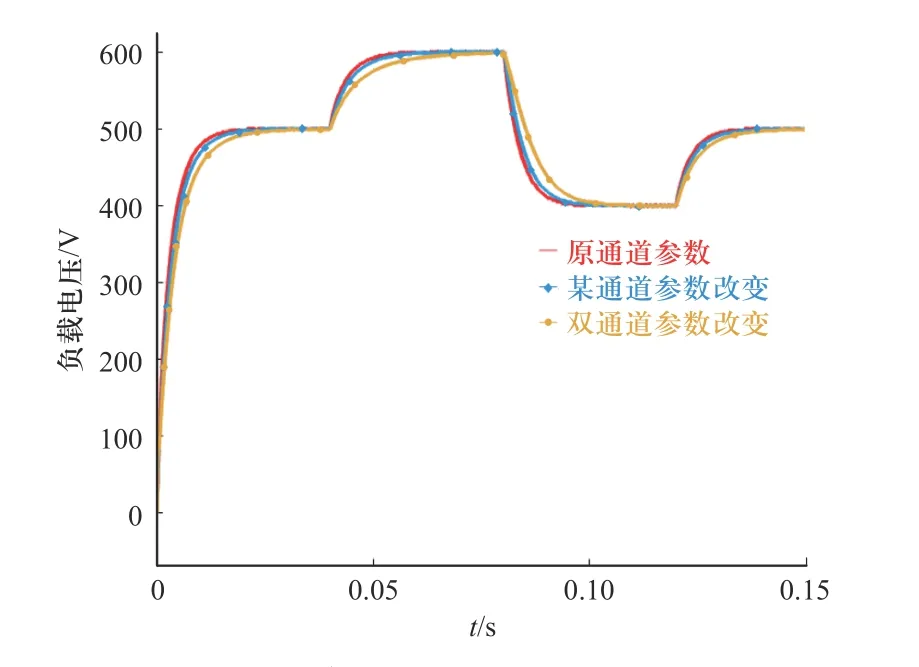
图4 通道参数差异下负载电压调节效果Fig. 4 The effect of load voltage regulation under the difference of channel parameters
4.2 无线岸电系统负载阻值扰动仿真
调整逆变器输入直流电压至额定电压,负载电压控制器自动调整逆变器相移角. 在0.04 s 处,分别在10 kW 和15 kW 负载条件下,负载突变5 kW,因此进行500 V 下负载电阻从17 Ω 突变为12.5 Ω 和25 Ω,以及从25 Ω 突变为17 Ω 和50 Ω 的仿真,如图5 所示.

图5 仿真系统负载突变扰动调节Fig. 5 Simulation system load sudden disturbance adjustment
从图5 中可以看出:在发生负载阻值突变后,控制器迅速作用,突变时电压偏移大约3%,调节时间不超过15 ms,调节效果良好,可以满足系统的供电指标.
此外,脉冲负载作为一种特殊负载,脉冲负载的投切将造成输出端电压波动,影响系统的稳定运行,尤其是在总功率负荷超出无线电能传输系统最大输出功率时,系统将无法正常工作,可以在系统输出侧配置混合储能系统来实现脉冲干扰抑制,通过双向DC/DC 变换器(比如双有源桥DAB)将混合储能系统并联至输出端,利用无线供电与混合储能系统的协同控制抑制脉冲负载干扰.
4.3 无线岸电直流输入电压扰动仿真
为进一步保证无线岸电通道出现小幅度变化系统的良好稳定性,考虑直流输入电压(500 V)发生扰动的情况,改变岸电直流源Vd电压值,使逆变器直流输入电压发生突增和突降,改变负载电压给定值范围为±10%,观察负载电压调节情况,结果如图6所示.
从图6 可以看出,当岸电直流输入电压突增和突降情况下,控制器面对直流输入电压扰动时的调节时间均在14 ms 以内,即在设定的扰动范围内,系统的调节时间基本不受扰动量影响. 由于直流输入源电压的偏移,导致当前系统实际状态出现偏差,控制器迅速作用并使负载电压保持稳定,以上实验充分验证了PI 控制器的鲁棒性以及全系统的良好稳定性.

图6 岸电电压突降扰动调节Fig. 6 Shore voltage dip disturbance regulation
4.4 通道参数差异下系统输出电压实验效果
按照4.1 节给出的仿真参数,进行系统实验,设定系统额定输出电压500 V,首先单独整定单通道PID 参数,整定完毕后,均调节衡控制器比例系数完成了功率均衡控制器的参数整定.
在参数整定合适的基础上,进行20 kW 的大功率实验. 输出端负载大小为12.5 Ω,输出电压设定值为500 V,可以看出虽然存在通道参数差异,但是系统输出电压可以迅速建立,且能够保持稳定,如图7 所示.

图7 功率20 kW 输出电压曲线Fig. 7 Output voltage curve when the power is 20 kW
为了验证样机系统的抗负载扰动能力,通过切换负载的空气开关,将输出功率由20 kW 变为15 kW,用示波器观察这一过程中输出电压变化曲线,如图8所示. 结果表明,负载扰动对系统输出电压影响非常微弱,输出电压由大约10~20 V 的波动,且在几个毫秒后恢复稳定,证明了控制器的设计效果.

图8 负载突变输出电压变化曲线Fig. 8 Load mutation output voltage curve
为了实现IPT 的模块化叠加,本文在现有拓扑的基础上,采用了输入输出并联型IPT 系统,该拓扑易于实现模块化,模块投入和切除可做到不影响系统运行;
为了解决多通道并联无线岸电系统通道参数差异及参数扰动引起的输出电压不稳定问题,本文建立了以逆变器移相角为输入、目标负载功率为输出的多通道并联无线岸电系统模型,采用能量-相角的方法降低系统阶数,建立系统小信号模型. 设计了基于Trapezoidal 阶梯双线性逼近法系统控制器,研究了通道耦合器参数差异、系统直流输入电压扰动、负载扰动三种工况下控制器的效果,并在Matlab 仿真模型和实验样机上验证了控制器设计效果.