伍 彬, 傅建明, 胡 珊, 蔡天星 , 鲍 然, 谢 峰, 魏忠武
(1. 上海机电工程研究所, 上海 201109; 2. 南京航空航天大学航天学院, 江苏南京 211106;3. 中国航天空气动力技术研究院, 北京 100074)
随着大型水面和空中平台短时间大规模远程投送能力的快速增长, 防区外远程目标给防御体系带来了巨大挑战。利用高超声速飞行器作为投送平台装载多枚高机动导弹实现远近结合大范围逐个投放的作战模式充分利用了高超声速飞行器快速抵近、 弹道灵活和导弹机动性强、 协同作战效能高的优点, 可有效应对远程目标的威胁。
高超声速飞行器投放多枚导弹通常有开舱侧抛、 抛罩后前推和抛底遮板尾退分离方式, 超/高超声速尾退方式因其在防热、 保形、 隐身、 多次投放、 回收等方面具有明显优势, 有望成为高超声速飞行器投放载荷的优选方案。具体而言, 高超声速飞行器迎风侧无分离结构接口缝隙, 有效避免了长时间高超声速飞行气动加热严重、 缝隙处热流密度大、 防隔热设计困难等问题; 分离投放时高超声速飞行器气动外形不会被破坏, 既易于实现多次投放, 又能显著降低雷达散射面积[1]从而不易被发现, 甚至可能实现投送平台的回收再利用; 投放的导弹分离过程中无须穿过高超声速飞行器附近的剪切层和激波[2-6]或直接暴露在来流冲击环境中。超/高超声速尾退分离的导弹在受到弹射力向后运动过程中, 完全处于高超飞行器尾部复杂的非定常流场影响区内, 本质上是带空腔超/高超声速底部流动与多体分离构成的耦合问题。底部流动包含膨胀波、 自由剪切层、 分离涡、 激波等多种流动结构, 存在剪切层与膨胀波和压缩波的相互干扰, 大涡结构与激波的相互干扰导致流动呈现高频非定常特性[7-13]。流动分离首先会在底部形成一个低压低速区域, 随着流动向后发展逐渐恢复为亚声速、 跨声速、 超声速, 甚至高超声速流动, 是典型的跨速域流动。空腔的存在还会导致流动发生流声耦合现象, 产生明显的周期性压力振荡。
针对内埋武器、 助推器、 抛罩(壳)分离投放等多体分离问题, 宋威等进行了较为系统的论述和研究[14-20]。超/高声速尾退分离作为一类新的多体分离问题, 很难直接套用已有的分离模式。与载机投弹相比, 高超声速投送平台无动力, 在分离过程中高度、 速度甚至姿态都无法保持, 为了利于后续分离, 投送平台需要稳定控制到一定状态范围内; 与导弹助推器级间分离相比, 助推器前后级分离关注的重点在于“分得开”, 即通过气动设计使得前后级形成一定加速度差[21]以实现快速分离, 而尾退分离导弹既关注是否“分得开”, 同时为了给分离后导弹发动机点火创造良好的条件, 还要关注是否“控得住”的问题; 与抛罩(壳)分离相比, 抛罩(壳)后分离体暴露在来流和本体破坏后形成的开放式冲击流场中, 而尾退分离过程中导弹一直处于相对封闭的投送器尾流场中, 所处的分离环境差异很大。
目前, 国内外针对尾退分离问题的研究还比较少。试验方面, Butler等在Eglin的Aeroballistic Research Facility (ARF) 试验场进行了Ma=4.96条件下炮弹(尖锥-圆柱-尾裙旋成体构型)从相同外形的母体中尾退分离试验[22], 获得了炮弹尾退分离的外弹道特性和分离流场的纹影图像。Jung等通过风洞试验采用纹影、 快响应压力传感器和压力敏感漆技术(pressure-sensitive paint, PSP)研究了Ma=2.93, 攻角α=0°条件下半锥角为10°的分离体(圆锥-圆柱旋成体构型, 直径为 9.135 mm, 长细比为 5.6)从外形相近但尺寸更大的母体(圆锥, 包含有无内部空腔两个模型, 直径为21.75 mm)中尾退分离的流场结构和物面压力特性[23-24]。王元靖等在0.6 m×0.6 m 跨/超声速风洞中采用网格测力试验方法开展了Ma=3.0, 母体攻角0°, 分离体攻角变化范围-5°~5°条件下钝头旋成体(尾部沿周向均布弧形翼)从升力体中尾退分离的研究, 得到了纵向平面内不同测力点上的气动力数据[25]。数值计算方面, Sahu等采用定常和非定常Reynolds平均Navier-Stokes(Rey-nolds average Navier-Stokes, RANS)方法研究了Ma=4.4, 攻角0°条件下单个圆柱和串列双圆柱从尖锥-圆柱-尾裙构型前体中尾退的阻力特性和分离特性[26]。Simko等采用RANS和分离涡模拟(deta-ched-eddy simulation, DES)方法对真实飞行状态和带风洞洞壁状态尾退分离的底部压力、 无量纲流向速度、 流场结构、 阻力特性等进行了比较研究[27], 研究模型及状态与Jung一致。Johnson在Simko研究的基础上, 采用RANS(湍流模型为Baldwin-Lomax模型)和DES方法对分离Ma=2.9时, 不同攻角和分离过载条件下, 小圆锥从大圆锥中尾退分离的非定常分离阻力特性和轨迹进行了计算研究[1]。上述工作主要针对简单无控旋成体, 重点研究了初始时刻分离体和母体同轴的尾退分离流场、 阻力特性以及气动特性, 尚未见有分离体与母体不同轴、 考虑分离过程中舵面效率变化和控制律对分离结果影响的CTS试验研究相关报道。
本文以4片控制面的导弹为研究对象, 针对分离体与母体不同轴的超声速多弹逐个尾退分离问题, 同时开展了网格测力和CTS试验研究, 分析了尾退分离流场结构和典型干扰特征、 全弹气动特性、 舵效损失以及控制律、 攻角、 高度和Mach数对分离特性的影响。
1.1 试验设备
该试验在中国航天空气动力技术研究院的FD-12风洞中完成。该风洞是一座直流暂冲式亚、 跨、 超三声速风洞, 风洞试验段横截面尺寸为1.2 m×1.2 m, 亚跨声速试验段长度为3.8 m, 超声速试验段长度为2.4 m(见图1)。试验的Mach数范围为0.3~4.0, 常规测力攻角范围为-15°~25°。

图1 FD-12风洞Fig. 1 FD-12 wind tunnel
利用FD-12风洞的CTS试验系统实现导弹的尾退分离运动和测量[28-29], 该系统的6自由度机构采用并联形式(见图2), 经地面标定及风洞试验验证, 具有位姿定位精准度高、 机构刚度高、 变形小等特点。位置定位精度优于±0.1 mm, 姿态定位精度优于±0.05°[30], 线速度大于500 mm/s, 角位移大于45(°)/s, 可准确定位模型的位置, 以获取准确位置和姿态角下的气动载荷, 得到准确的分离轨迹。轴向、 侧向和垂向的最大运动空间分别为550, 700, 600 mm, 俯仰、 偏航和滚转范围分别为±40°, ±40°, ±180°。投送平台采用攻角机构支撑, 攻角变化范围为-2°~15°, 侧滑角变化范围±5°。试验系统能满足大部分CTS试验的工作空间和定位精度需求。

图2 CTS 6自由度并联机构Fig. 2 CTS 6 DOF parallel mechanism
1.2 试验方案与试验流程
投送平台模型在风洞中采用类菱形截面的背部支撑方式, 以尽可能小地降低背部支撑对尾流场的影响, Burt等的研究结果也表明这种形式的支撑带来的影响在尾流场研究中是可以接受的[31]。模型背部设有供支撑机构通过的豁口, 专用背部支撑机构与6分量内式天平固连, 天平前端与投送器模型连接, 专用背部支撑机构与可变攻角的刚性支架相连。导弹模型在风洞中采用尾部支撑方式, 模型内腔通过锥配合与6分量内式天平连接, 天平后端通过楔子连接支杆, 试验方案如图3所示。

图3 尾退分离CTS试验方案示意图Fig. 3 CTS solution of aft ejection separation
CTS试验流程如图4所示[32-33]。试验开始前, 根据分离初始条件设定初始位置、 姿态、 分离相对速度以及角速度等, 并将导弹模型放置在安全位置, 避免风洞启动时导弹模型受来流冲击后抖动与投送平台发生碰撞。试验开始后, 通过内置的测力天平同步测量投送平台和导弹的气动力, 首先对气动力引起的天平和支杆弹性变形进行修正, 并根据需要进行底阻(CTS系统中的6分量天平可以测量导弹的前阻, 但无底压管, 因此无法测量底阻)、 舵效、 动导数等导弹气动系数的修正。再按真实飞行状态下的动压和导弹/投送平台参数, 得到全尺寸导弹和投送平台所受的气动力/力矩。接着, 由轨迹解算软件同时对投送平台和导弹的轨迹进行解算, 得到模型在风洞中下一时刻的位置、 姿态等信息。将解算得到的位置和姿态指令发送至6自由度运动机构控制系统, 运动机构控制系统按照位置和姿态指令运动, 此过程中对投送平台位移进行补偿。模型到位后继续进行测量和计算, 直到完成全部试验内容。试验中重力对投送平台和导弹纵向位移的影响均不考虑。
CTS试验中, 每条轨迹布置34个测量点, 前5个点试验物理时间步长0.01 s, 后29个点试验物理时间步长0.02 s。采用4阶Runge-Kutta解算6自由度运动方程, 积分步长取为0.001 s。

图4 CTS试验流程Fig. 4 Flowchart of CTS test
2.1 试验模型
试验模型主要包括投送平台、 导弹1、 导弹2和滑轨模拟件, 其中导弹1为试验弹, 导弹2为模拟弹, 两者均可拆卸(见图5)。试验弹与滑轨之间初始间隙为5 mm, 间隙根据试验实际情况可以调整。滑轨表面铺有软材料, 避免因分离刚性碰撞导致模型损坏。同时为了监测分离过程中拦截弹是否与投送器舱内任意部位相碰, 设计了专门的导通回路, 在碰撞时电路接通, 试验系统自动中止工作。

图5 投送平台和导弹模型示意图Fig. 5 Carrier and missile test model
2.2 试验状态
定义导弹前滑块脱离滑轨瞬时为试验的起点, 此时导弹与滑轨之间不存在结构约束, 成为可以相互独立运动的两体。这种处理虽然满足了风洞试验开展的需要, 但给脱离滑轨瞬时状态的确定带来了困难, 为了综合考虑不同影响因素, 采用Monte Carlo打靶法进行结构-气动-运动耦合的多体动力学仿真给出脱离滑轨瞬时状态范围(即分离试验的初始状态)。试验Ma=3.0~3.5, 高度H=25~30 km, 攻角α=-2.0°~4.0°, 侧滑角β=-2.0°~5.0°, 尾退分离初始速度范围为10~12 m/s, 俯仰、 偏航和滚动初始姿态角均为0°。初始攻角通过攻角机构给定, 侧滑角通过角度块改变模型在风洞中的安装角度给定。
位移定义在风洞坐标系中, 即脱离滑轨瞬时导弹的质心位置为原点O,OX轴从原点指向导弹头部为正,OY轴位于铅垂平面向上为正,OZ轴由右手定则确定(见图6)。气动力定义在弹体坐标系中, 力矩参考点为满载质心。零攻角零侧滑条件下, 初始时刻的弹体坐标系与风洞坐标系重合。

图6 坐标系示意图Fig. 6 Coordinate definition
3.1 流场分析
图7给出了尾退分离干扰流场的纹影结果。投送平台和导弹的头部激波、 投送平台尾部的膨胀波以及尾流场中的剪切层、 再附激波和洞壁的反射激波等主要流场结构都能很清晰地观察到。根据Herrin等[34]的研究, 超声速底部流动还存在回流区域(见图8), 但受限于纹影的显示能力, 在本文纹影图中无法观察到该现象。

图7 尾退分离流场结构(纹影)Fig. 7 Flow structure of aft ejection separation(schlieren)

图8 超声速底部流动示意[34]Fig. 8 Sketch of supersonic base flow[34]
图9给出了Ma=3.0,α=0°时导弹在不同分离位置的流场纹影。定义D为投送平台特征尺寸(取尾段最大直径), |x|/D为无量纲轴向分离距离。总的来看, 试验过程中导弹始终处于投送平台尾流场的影响区域内。分离初始时刻, 导弹弹身前部位于尾流区的低速区域, 尾部控制面上出现激波。随着弹体向后运动, 弹体上下两侧的再附激波宽度略有减小(图9(c)→(d))。随着分离距离的逐渐增加(图9(e)), 流动恢复为超声速, 导弹头部开始出现斜激波, 此时|x|/D=1.982, 与Jung等[23], Dutton等[35]的研究结果较为接近。
从流场结构和舵效变化两方面对尾退分离流场进行分析, 可以发现4种典型的干扰特征。第1种是低速、 亚声速无激波干扰特征, 如图10(a)所示, 导弹完全处于投送平台尾流场的低速和亚声速区域, 导弹与投送平台之间存在相互影响, 导弹上无激波产生, 此过程导弹不进行姿态稳定控制, 无须进行舵效修正; 第2种是高亚声速、 跨声速弱激波干扰特征, 如图10(b)所示, 剪切层在弹体的挤压下向上下两侧移动, 使得再附激波的产生位置和后滞止点(rear stagnation point, 见图8)向后移动, 弹体周围既有低速、 亚跨声速流动, 又有超声速流动(图9(a)~(d)), 此过程导弹进行姿态稳定控制, 舵效受尾流影响很大, 需进行舵效修正。第3种是超声速激波干扰特征, 如图10(c)所示, 随着导弹进一步向尾流区后方运动, 弹体对剪切层的挤压基本消失, 导弹完全处于再附激波后方, 只存在投送平台对导弹的影响, 导弹头部出现激波, 此时弹体完全处于超声速尾流场中(图9(e), (f)), 此过程导弹也进行姿态稳定控制, 舵效仍受尾流影响较大, 也需进行舵效修正。第4种是准自由流弱干扰特征, 此时导弹已尾退到足够远的距离, 投送平台对导弹的干扰基本消失, 如图10(d)所示。

(a) |x|/D=0.0

(b) |x|/D=0.535

(c) |x|/D= 0.894

(d) |x|/D= 1.618

(e) |x|/D= 1.982

(f) |x|/D= 2.35

(a) Interference type without shock

(b) Interference type with weak shock

(c) Interference type with strong shock

(d) Quasi-freestream interference type图10 尾退分离流场典型干扰特征Fig. 10 Typical interference characteristics of aft ejection separation
3.2 全弹气动特性影响分析
导弹处于投送平台尾流场的影响区域内, 其气动特性与自由流状态相比必然存在差异。图11给出了Ma=3.5,α=0°时, 尾流干扰和自由流条件下导弹的气动系数对比曲线。CN,CZ,Mx,My,Mz分别为导弹法向力、 侧向力、 滚转力矩、 偏航力矩和俯仰力矩系数。分析可知, 全弹气动特性受到严重的尾流干扰影响, 与分离距离之间表现为显著的非线性特点。其中, 法向力系数增大, 可能原因是来流在投送平台尾部膨胀后流经弹体时, 导弹当地攻角大于来流攻角; 对质心的俯仰力矩系数存在符号变化, 可能原因是导弹在不同分离位置时对气动力产生主要贡献的导弹部位不同; 横侧向气动系数明显增大, 其原因是拦截弹位于投送平台一侧, 且底部流动不对称。此外, 当导弹运动到最大分离距离时, 全弹气动特性与自由流状态仍存在较大差异, 说明投送平台尾流干扰的影响距离是比较远的。

(a) Normal force coefficient
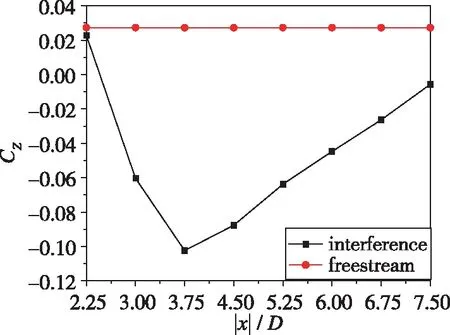
(b) Side force coefficient

(c) Rolling moment coefficient

(d) Yawing moment coefficient

(e) Pitching moment coefficient图11 尾流干扰与自由流气动系数对比Fig. 11 Aerodynamic characteristic comparision between interference and freestream
3.3 舵效影响分析
导弹尾退分离过程中若不进行稳定控制, 很可能无法实现安全稳定的尾退分离, 特别是滚动通道, 由于转动惯量较小, 在横侧向力矩显著增加的情况下, 其角加速度和角速度可能迅速增大, 最终导致姿态发散。影响导弹控制的一个重要因素是舵效, 因此除考虑全弹气动特性的变化外, 还应关注尾流场中导弹舵效的变化。


(a) Roll control effectiveness

(b) Yaw control effectiveness

(c) Pitch control effectiveness图12 尾流干扰与自由流舵效对比Fig. 12 Control effectiveness comparision between interference and freestream
3.4 尾退分离结果分析
获得尾流场对舵效的影响后, 采用最小二乘拟合方法获得舵效随无量纲分离距离变化的表达式, 并将其作为控制律模块的输入参数, 实现带控制律CTS试验中舵效随距离的修正。针对有无控制律、 变攻角、 变高度、 变Mach数这4种情况, 分别开展尾退分离影响研究。
(1)有无控制律对尾退分离的影响
图13给出了有无控制律条件下导弹的无量纲分离位移(按投送平台特征尺寸D无量纲化)和姿态。x/D,y/D,z/D分别为轴向, 竖向和侧向无量纲位移,ψ,θ,γ分别为偏航、 俯仰和滚转姿态角。分析可知, 控制律对分离位移的影响较小, 主要影响分离姿态。加入控制律后, 姿态发散得到了很好的抑制。特别是滚转角, 无控制律时滚转角的值很快发散到-40°以上, 加入控制律后先发散后逐渐收敛。

(a) Displacement

(b) Attitude图13 有无控制律的导弹位移、 姿态结果对比Fig. 13 Comparision with and without control
(2)攻角对尾退分离的影响
图14给出了攻角α=-2°, 4°, 无控制律条件下导弹的分离位移和姿态。分析可知, 攻角对轴向和侧向位移影响很小, 对纵向位移有一定影响, 原因是不同分离攻角条件下导弹所受的纵向气动力不同, 从而影响纵向位移。俯仰和偏航角逐渐收敛, 无发散趋势; 滚转角均呈发散趋势, 正攻角发散的程度大于负攻角, 攻角增大可能不利于滚动稳定。

(a) Displacement

(b) Attitude图14 不同攻角导弹位移、 姿态结果对比Fig. 14 Comparision between different angles of attack
(3)高度对尾退分离的影响
图15给出了高度H=28, 29 km时导弹的分离位移和姿态。分析可知, 高度对位移的影响很小, 主要影响滚转姿态角, 高度增加后, 滚转角绝对值最大减小9°, 对俯仰、 偏航姿态角的影响小于1°, 增加分离高度可能使滚动发散减小。

(a) Displacement

(b) Attitude图15 不同高度导弹位移、 姿态结果对比Fig. 15 Comparision between different altitudes
(4)Mach数对尾退分离的影响
图16给出了Ma=3.0, 3.5时导弹的分离位移和姿态。分析可知, 与高度影响相同, Mach数也主要影响姿态角, 对位移的影响较小。Mach数降低后, 姿态角绝对值有所增加。另外, 综合图13~16进行分析, 还可以得到两个结论:
一是滚动始终朝着负滚转角方向发散, 说明当弹体从投送器的某一侧尾退分离时, 初始时刻滚转力矩方向总是确定的, 即顺航向看滚转力矩使弹体逆时针转动; 二是总的来看, 控制律、 攻角、 高度和Mach数等因素对导弹尾退分离运动的位移影响均比较小。

(a) Displacement

(b) Attitude图16 不同Mach数导弹位移、 姿态结果对比Fig. 16 Comparision between different Mach numbers
本文采用网格测力和CTS风洞试验方法对导弹超声速尾退分离干扰流场、 气动特性以及分离特性进行了研究, 得到了以下结论:
1)基于纹影结果给出了尾流场的主要流动结构, 并得到了4种典型的尾退分离干扰特征。
2)导弹较长时间处于投送平台尾流场的影响区域内, 全弹气动特性具有显著的非线性特点。受投送平台尾流场干扰的影响, 导弹舵效最大降低40%, 但未发生舵效反效。随着尾退分离距离的增大, 舵效逐渐恢复。
3)控制律、 攻角、 高度和Mach数对导弹尾退分离运动的位移影响均较小, 对姿态的影响较大。弹体尾退过程中, 无控制律介入时滚转最先发散, 发散角度超过-40°, 加入控制律后, 滚转姿态先发散后收敛。此外, 弹体从投送器的某一侧尾退分离时, 初始时刻滚转力矩方向总是确定的, 滚动始终朝着负滚转角方向发散。
本文采用试验方法研究了超声速尾退分离问题, 给出了部分结论, 未来将结合数值计算方法, 进一步开展超/高超尾退分离流动干扰机理、 双6自由度非定常仿真、 高维非线性气动建模以及强扰动条件下的弹体稳定控制等研究工作。
猜你喜欢尾流攻角激波尾流自导鱼雷经典三波束弹道导引律设计优化∗舰船电子工程(2021年6期)2021-06-28一种基于聚类分析的二维激波模式识别算法航空学报(2020年8期)2020-09-10基于HIFiRE-2超燃发动机内流道的激波边界层干扰分析航空发动机(2020年3期)2020-07-24风标式攻角传感器在超声速飞行运载火箭中的应用研究宇航总体技术(2019年5期)2019-10-11斜激波入射V形钝前缘溢流口激波干扰研究实验流体力学(2018年3期)2018-10-10适于可压缩多尺度流动的紧致型激波捕捉格式北京航空航天大学学报(2017年8期)2017-12-20大攻角状态压气机分离流及叶片动力响应特性北京航空航天大学学报(2017年7期)2017-11-24飞机尾流的散射特性与探测技术综述雷达学报(2017年6期)2017-03-26锥形流量计尾流流场分析天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29附加攻角效应对颤振稳定性能影响振动与冲击(2015年2期)2015-05-16