高 振 卢彩云 李洪文 何 进 王庆杰 王志楠
(1.中国农业大学工学院, 北京 100083;
2.农业农村部河北北部耕地保育科学观测实验站, 北京 100083)
准确获取播后土壤中种子空间分布信息,建立基于种子空间分布信息的作物位置电子地图,能够为作物生长全过程精准高效管理提供基础位置信息,为基于种子空间分布的漏播检测及补偿、定位施肥、定点除草、对行植保和收获等田间精准作业提供基础数据来源,进而提高资源利用率,是农业精细化生产的基础[1-5]。
为准确获取土壤中的种子空间分布信息,研究团队尝试将机器视觉技术应用于种子在种床中的空间分布位置检测中,种子通过开沟器导种管落入种床后,使用工业相机采集种床中种子位置图像,并利用目标检测算法对种子位置进行识别。并保证检测过程不对土壤回填产生影响,在种子分布信息检测结束后,保证土壤能够顺利回填覆盖种子,减少土壤扰动,避免影响种子萌发。
机器视觉技术在种子检测方面有广泛应用,YAZGI 等[6]采用高速摄像技术对排种过程种子的运动轨迹及排种均匀性进行研究,为优化排种器参数提供理论依据。NAVID 等[7]在播种机前方的传送带上安装摄影机采集番茄种子图像,对排种器的播种状态进行判断。马旭等[8]运用图像处理技术对种子动态图像进行分析,提出了一种根据种子面积和种子间距特征评估排种器性能的方法。廖庆喜等[9]提出一种精密排种器性能检测方法,将光电传感器与高速摄影同时用于精密排种器的性能检测。土壤回填率方面,赵淑红等[10]针对马铃薯播种开沟器高速作业条件下作业阻力大、回土深度浅等问题,设计一种仿黄鳍金枪鱼下颚曲线的曲面式开沟器,曲面式开沟器比芯铧式开沟器、靴式开沟器平均作业阻力减小18.3%、33.4%,平均回土深度增加70.4%、91.7%;
史乃煜等[11]针对湿黏土壤条件下免耕播种机施肥铲回填性能弱,导致的种肥同床等问题,设计了一种强制回土装置,优化后的最速降线式强制回土装置较直板式强制回土装置的土壤回填率提升16.5%。
以上研究均将机器视觉技术应用于播种过程中的排种环节,进行种子在排种器中的位置或运动信息检测。将机器视觉应用于开沟落种和回土覆种环节,进行种子在种床中空间分布信息检测的研究鲜有报道。其主要原因在于,现有播种开沟装置作业时,种子落入种床后立即被回落土壤覆盖,在开沟落种和回土覆种的间隙,应用机器视觉技术检测种子在土壤中的空间分布信息,存在极大困难。为此,本文设计一种面向种子位置信息视觉检测系统的开沟延时回土装置。通过开沟装置、导土装置、压种装置及回土装置的配合作业,在开沟落种和回土覆种的间隙,实现种床图像的采集,并保证土壤回填率,避免影响种子萌发。
1.1 种子分布信息视觉检测系统

图1 种子分布信息视觉检测系统Fig.1 Vision detection system for seed distribution information
种子分布信息视觉检测系统主要包括开沟延时回土装置、种床图像采集模块、种床图像拼接模块、全景图像种子目标检测模块。其中,开沟延时回土装置可为种床图像采集提供避让空间。种床图像采集模块主要包括工业相机、数据传输线路、图像采集软件等。种床图像拼接模块和全景图像种子目标检测模块的核心分别为图像拼接算法和目标检测算法。系统组成如图1所示。
1.2 开沟延时回土装置结构组成
开沟延时回土装置结构如图2所示,主要包括开沟器主架、回土板高度调节组件、导土装置、转角调节三通接头、开沟器铲尖、回土板、压种辊、回土板转角调节组件、回土板连接杆、工业相机安装板、回土高度调节板、导种管。其中导土装置共两块导土板,分别焊接在开沟器主架后方,导种管两侧的位置;
压种辊通过销轴安装在两导土板之间,导种管末端后方;
工业相机安装板为T形结构,其中宽板焊接在导种管上,窄板上开有螺纹孔,用于安装工业相机。其中,回土板连接杆焊接在回土高度调节板上,通过螺栓与工业相机安装板连接,形成回土板高度调节组件;
回土板通过转角调节三通接头与回土板连接杆连接,形成回土板转角调节组件;
回土板高度调节组件、回土板转角调节组件与回土板组成回土装置。

图2 开沟延时回土装置Fig.2 Opening soil backfilled device1.开沟器主架 2.回土板高度调节组件 3.导土装置 4.转角调节三通接头 5.开沟器铲尖 6.回土板 7.压种辊 8.回土板转角调节组件 9.回土板连接杆 10.工业相机安装板 11.回土高度调节板 12.导种管
1.3 工作原理
作业工序为:①开沟破土形成种床,固定种子在种床中的位置。②延长土壤回落时间,形成有利于图像采集的避让空间,保证图像采集期间无回落土壤干扰。③工业相机进行图像采集,图像采集完成后土壤回落覆盖种床中的种子。作业时,开沟延时回土装置安装在播种机上,由拖拉机带动,以速度v前进,土壤被开沟器铲尖破开形成种床,种子经导种管落入种床,压种辊将种子压入土壤中,固定种子位置并防止种子弹跳。开沟器破开的土壤在导土装置导流作用下流动至种床两侧形成泛起土壤,使土壤无法回落覆盖种子,形成避让空间,为原始图像采集提供保障。工业相机在避让空间内完成原始图像采集后,种床两侧的土壤在回土装置作用下重新回填种床,实现均匀覆土,提高土壤回填率,回土板调节组件可依据不同播种深度及土壤条件要求,进行回土板转角和高度的调节。通过导土装置和回土装置的共同作用,为原始图像采集提供足够的反应时间和避让空间,达到延时回土的目的,土壤颗粒相对运动轨迹如图3所示。

图3 土壤颗粒相对运动轨迹Fig.3 Relative trajectory of soil particles1.开沟器铲尖 2.导土板 3.回土板 4.种床
开沟延时回土装置通过导种装置、压种装置、回土装置的配合作用,延长开沟落种环节和回土覆种环节的作业间隙,形成有利于原始图像采集的避让空间,并保证土壤回填率,以此为目标对导土装置、回土装置等关键装置进行结构设计。
2.1 导土装置
导土装置主要功能包括:①挡住土壤回落趋势,使其沿导土装置边界向外流动,并在种床两侧形成泛起土壤,防止土壤回落覆盖种子。②导土板和开沟器主架组合形成有利于图像采集的避让空间,覆盖相机视场。③相机镜头探入避让空间中,避免导土装置外的图像进入视场,使原始图像背景简化,降低目标检测难度,提高检测效率[12]。导土装置主要功能部件为焊接在开沟器主架两侧的导土板,如 图4 所示,导土板主要结构参数包括:高度hd、长度ld、偏角θd。

图4 导土装置Fig.4 Soil vectoring device1.开沟器主架 2.导种管 3.开沟器铲尖 4.工业相机 5.导土板 6.压种辊
2.1.1导土板高度

图5 导土板长度和高度确定Fig.5 Determination of length and height of soil vectoring plate1.工业相机 2.压种辊 3.导种管 4.开沟器主体 5.导土板 6.工业相机视场 7.开沟器铲尖
为避免导土装置外的图像进入视场,保证原始图像背景简化,导土板高度hd应大于镜头与物体之间的距离hD,即hd≥hD,如图5所示。根据镜头透视原理,镜头与种床之间的距离hD的计算式为
hD=l1f/lc
(1)
式中lc——镜头的靶面长度,mm
f——镜头焦距,mm
l1——工业相机视场长度,mm
由文献[13]可知相机视场长度l1最佳取值范围为117~152 mm,本文选择l1=130 mm;
检测所用镜头为定焦定制镜头,焦距f=8 mm;
镜头传感器规格为2/3″CCD,靶面长度lc=6.6 mm,代入式(1),计算得hD≈157 mm,即导土板高度hd≥157 mm,因此设计导土板高度hd为160 mm。
2.1.2导土板长度
为防止土壤回落覆盖种子影响原始图像采集,导土装置形成的避让空间在前进方向上的长度应覆盖导种管、压种辊、工业相机视场,如图5所示,导土板长度ld由工业相机视场长度l1、压种辊直径d1、导种管直径d2共同确定,导土板长度计算式为
ld≥l1+d2+d1
(2)
其中,压种辊直径d1=30 mm,由前文可知l1=130 mm,所用导种管直径d2=40 mm,代入式(2),计算得ld≥210 mm,因此设计导土板长度ld为220 mm。
2.1.3导土板偏角
导土板偏角是导土板平面与前进速度垂直方向的夹角,偏角θd对开沟作业阻力及种子位置稳定性有较大影响。当偏角θd>90°时,如图6a所示,导土板外倾,开沟宽度大,作业阻力大;
开沟器铲尖破出的土壤颗粒受到导土板向前的推力作用,向远离种床的方向运动,导致泛起土壤的宽度增加,不利于后续回土作业[14]。当偏角θd<90°时,如图6b所示,种子落入种床后,被压种辊固定于种床,而导土板内倾,两导土板末端距离变小,导土板末端随机具前进易导致玉米种子的固定位置被破坏,影响检测结果。所以为减小作业阻力,并保证种子位置稳定性,取偏角θd=90°,即导土板与前进方向平行,如图6c所示。
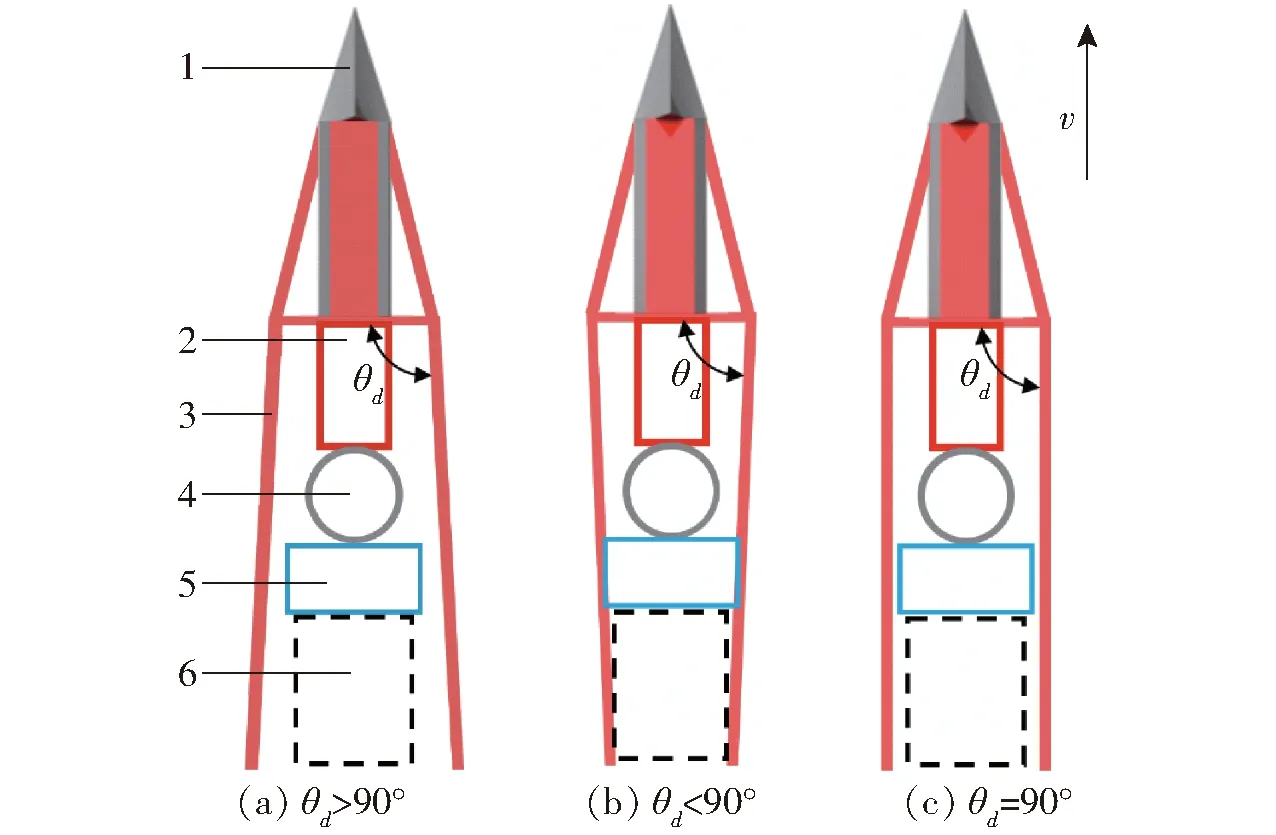
图6 导土板偏角Fig.6 Angle of soil vectoring plate1.开沟器铲尖 2.开沟器主架 3.导土板 4.导种管 5.压种辊 6.相机视场
2.2 回土装置
开沟回土是播种作业过程中的关键环节,开沟器铲尖破开土壤形成种床,种子落入种床后,在种子上覆盖一定厚度的土壤,即可减少土壤扰动,提高种子出苗率,又可保证种子播种深度、株距及侧向分布的均匀性[15-16]。开沟延时回土装置作业时,导土装置阻止土壤回落的同时,挤压泛起土壤,产生一定的固化效应,导致土壤自回填性能降低,土壤扰动增大。回土装置可以将固化的泛起土壤推回种床,提高土壤回填率,实现均匀覆土。
回土装置共分为左、右两套,分别安装在开沟器两侧,导土装置后方,相互独立可调节,主要包括回土板和回土板调节组件。回土板连接杆焊接在回土高度调节板上,通过螺栓与工业相机安装板连接,回土高度调节板可沿沟槽滑动,可以实现回土板高度30~50 mm范围内的无级调节;
回土板通过转角调节三通接头与回土板连接杆连接,三通接头与连接杆末端均开有转角角度调节孔,孔位呈交错布置,通过螺栓连接固定,可以实现回土板转角30°~70°范围内调节,其安装位置和结构组成如图7所示。回土装置主要功能部件为回土板,其主要结构参数包括:长度lh、高度h1、转角α。
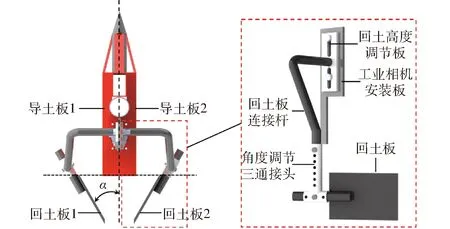
图7 回土装置Fig.7 Soil backfilling device
2.2.1回土板长度
由图7可知,为保证回土效果,回土板长度lh在垂直于前进方向上的投影长度lr大于泛起土壤宽度w,即
(3)
联立求解得
lh>w/sinα
(4)
式中α——回土板转角,(°)
由实测试验得w<60 mm,为保证土壤回填率,回土板转角应大于30°,即α>30°,代入式(4)计算得lh>120 mm,设计回土板长度lh为120 mm。
2.2.2回土板高度
由图8可知,为保证回土板高度h1覆盖种床两侧的泛起土壤,需满足回土板高度h1大于侧泛起土壤的高度h2,即
h1>h2
(5)
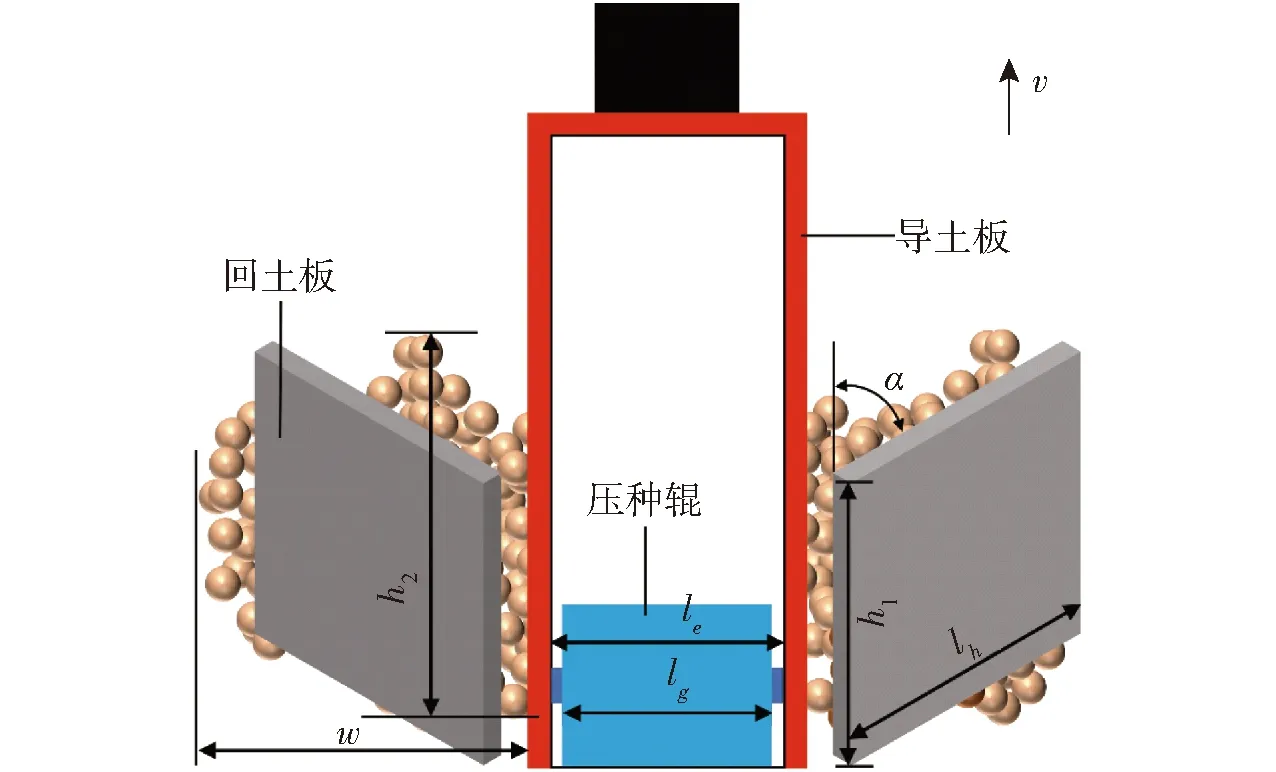
图8 回土板结构参数确定Fig.8 Determination of structural parameters of soil backfilling plate
由实测试验得h2<30 mm,即h1>30 mm,而为了避免回土板与导土板因高度过多重叠形成狭窄通道,使回落土壤通过性变差[17-18],确定回土板高度h1为50 mm。
2.2.3回土板转角

图9 土壤回填率Fig.9 Soil backfill rate
回土板转角α为回土板平面与机具前进方向的夹角,对土壤回填率有较大影响,取泛起土壤中的土壤颗粒进行受力分析如图9a所示,土壤颗粒受回土板向前的推力F、地面对移动土壤的摩擦力fn以及回土板对移动土壤的摩擦力ft的综合作用,摩擦力fn和ft远小于回土板推力F,可忽略不计。回土板推力F分为平行于回土板平面的分力FT和垂直于回土板平面的分力FN,计算式为
(6)
当回土板转角α减小时,推动土壤回填的力FN减小,导致土壤回填率降低,当α=0°时,回土板随机具前进呈现切土现象,无法推动土壤回落,如图9b所示。当回土板转角α增大时,推动土壤回填的力FN增大,土壤回填率增大,但当α过大时,回土装置与导土装置之间会出现土壤拥堵现象;
当α=90°时,回土板平面垂直于前进方向,大量土壤拥堵导致土壤颗粒被推向远离种床的区域,只有少量土壤颗粒被推回种床,使土壤扰动增大,如图9c所示。回土板转角α的最优值无法通过理论分析获得,需通过试验确定。
2.3 压种辊
压种辊位于两导土板之间,导种管末端后方的位置,表面与地面接触,通过摩擦力驱动压种辊转动,在种子落入种床后将其压住,防止其触土弹跳,并固定种子位置。为避免压种过程对种子造成损伤,影响种子萌发,选择厚度为5 mm,硬度为60 HA的疏水性聚氨酯作为压种辊表面覆盖材料,直接与种子接触。压种辊主要结构参数包括:长度lg、直径d1。
2.3.1压种辊长度
如图8所示,为防止导土板对压种辊产生挤压,导致其转动副失效而产生拖动滑移,对种子位置产生影响,压种辊长度lg应略小于两导土板之间的距离le,即
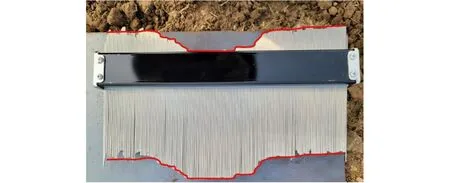
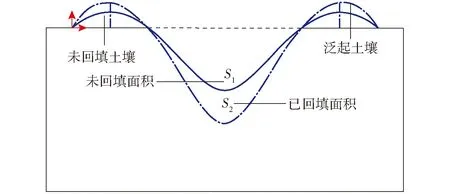
lg (7) 其中,两导土板之间的距离le=60 mm,设计压种辊长度lg为55 mm。 2.3.2压种辊直径 压种辊直径对于种子位置的影响较大,相同开沟速度下,当压种辊直径d1过大时,其转速相应减小,导致表面更易粘附湿土,进而粘附种子,改变种子位置; 受限于作业环境和观测条件,田间试验时难以完成对开沟回土的过程观测,本文使用离散元仿真方法对开沟延时回土装置开沟回土过程进行模拟,分析开沟延时回土装置开沟、延时和回土过程中土壤颗粒数量变化,并以此为依据表征开沟延时回土装置延时回土性能,确定开沟速度v、回土板转角α等因素对土壤回填率Y的影响,确定最优参数组合。 试验地为沙壤土,依据文献对沙壤土参数的标定和田间实际测量数据,综合分析相关资料,同时考虑计算精度和计算速度的要求,确定采用半径4 mm球形颗粒,使用Hertz-Mindlin(no slip)接触模型建立土壤离散元模型[22-23]。根据试验所需最大开沟深度和计算精度、计算速度等要求,设置土槽的长×宽×高为1 500 mm×400 mm×200 mm。使用SolidWorks 2018完成开沟延时回土装置三维建模,导入EDEM离散元仿真软件,建立机具-土壤互作离散元模型,离散元仿真参数如表1所示。 图10 开沟回土过程分析Fig.10 Analysis of trenching and soil backfilling process 为量化开沟回土过程,在开沟器前方选取土块A,其长度lA取160 mm,宽度wA为种床宽度,高度hA为开沟深度。如图10所示,开沟回土过程主要分为5个阶段:准备开沟阶段,如图10a所示,此时开沟器铲尖尚未进入土块A,此时土块A中土壤颗粒数量为W1。开沟前期阶段,如图10b所示,t0时刻,开沟器铲尖进入土块A,土块A后方的土壤颗粒在开沟器铲尖推动下进入土块A导致颗粒数量增加。开沟完成阶段,如图10c所示,开沟器铲尖离开土块A,并带动少量土壤颗粒向前运动离开土块A,土块A中土壤颗粒数量减少; 表1 材料参数和接触参数Tab.1 Material parameters and contact parameters 以土块A为研究对象,通过EDEM分析开沟器铲尖进入土块A,到回土装置离开土块A这一完整开沟回土过程中土块A内颗粒数量变化情况,提取土块A中土壤颗粒数量变化数据,对开沟回土过程进行分析,土块A中土壤颗粒数量变化曲线如图11所示。 图11 土壤颗粒数量变化曲线Fig.11 Change of soil particle quantity 根据对土块A中土壤颗粒数量变化情况的分析,土壤回填率为回土完成后土块A中颗粒数量W2与开沟器铲尖尚未进入土块A时的颗粒数量W1的比值,即仿真土壤回填率Y0计算式为 (8) 开沟延时回土装置作业时,导土装置挡住回落土壤,为种子位置图像采集提供保障,但挡住土壤的同时,导土板挤压泛起土壤,产生一定的固化效应,导致土壤回填性能降低,土壤扰动增大。回土装置可以将固化的泛起土壤推回种床,提高土壤回填率,实现均匀覆土。因此,回土装置作用下的土壤回填率Y是本文需要重点关注的指标。 3.3.1试验方案与结果 结合前期理论分析和仿真预试验,确定各因素水平。综合考虑开沟速度对排种器性能和图像采集效果的影响,结合现有文献[24]及播种机作业速度需求,选取开沟速度1.6~2.2 m/s; 表2 试验因素与编码Tab.2 Test factors codes 3.3.2试验结果方差分析 方差分析结果如表4所示,根据表中试验数据,使用Design-Expert软件对土壤回填率进行二次回归分析,建立土壤回填率对开沟速度、开沟深度、回土板转角的二次响应面回归模型为 (9) 表3 试验方案及结果Tab.3 Test scheme and results 表4 土壤回填率方差分析Tab.4 Variance analysis of soil backfill rate 0.05); 3.3.3响应曲面分析 由图12a可知,固定回土板转角为40°,当开沟速度一定时,土壤回填率随开沟深度的增大而减小,两者呈负相关。开沟深度增大导致开沟延时回土装置破出的土壤增加,种床两侧泛起的土壤宽度增加,导致超出回土装置作业范围的土壤无法被推回种床,导致土壤回填率随开沟深度增大而减少。 由图12b可知,固定开沟深度为40 mm,当回土板转角一定时,土壤回填率随开沟速度增大而减小,两者呈负相关。开沟速度增大使开沟延时回土装置破出的土壤获得了更多的动能,向前向两侧运动的速度增大,种床两侧泛起的土壤宽度增加,导致超出回土装置作业范围的土壤无法被推回种床,导致土壤回填率随开沟速度增大而减少。 图12 土壤回填率响应曲面分析Fig.12 Response surface analysis of soil backfill rate 由图12c可知,固定开沟速度为1.9 m/s水平,当开沟深度一定时,土壤回填率随回土板转角增大而增大,两者呈正相关。回土板转角增大使其有效作业范围增大,可以将两侧泛起的土壤更多的推回种床,使土壤回填率随回土板转角增大而增大。 3.3.4参数优化 为得到延时回土开沟装置的最优参数组合,通过分析开沟速度、开沟深度和回土板转角的交互作用,利用Design-Expert软件中的Optimization模块对上述回归模型进行优化求解。其目标函数和优化约束条件为 (10) 对式(10)进行求解可得到多种优化组合,基于实际作业条件选取开沟速度1.6 m/s、开沟深度30 mm、回土板转角40°时,最大土壤回填率为97%。利用优化得到的最佳参数进行离散元仿真试验,所得土壤回填率为97.9%,与优化结果基本一致。 图13 播种单体Fig.13 Planter unit1.种箱 2.排种器 3.开沟延时回土装置 4.地轮 5.播种单体 6.USB 3.0数据线 7.控制计算机 8.工业相机 试验于2021年10月28日在山东省菏泽市郓城县(东经116°06′34″,北纬35°56′28″,海拔41 m)进行,试验地为耕整地,土壤平均含水率为15.12%,0~2.5 cm耕层土壤紧实度为57 kPa,2.5~5 cm耕层土壤紧实度为156 kPa,5~7.5 cm耕层土壤紧实度为298 kPa,7.5~10 cm耕层土壤紧实度为413 kPa,试验所用仪器包括土壤紧实度仪、取形器等。试验所用播种设备为具有种床内种子图像采集功能的玉米播种单体,如图13所示,播种单体由三点悬挂机架、行走地轮、排种器、种箱、开沟延时回土装置以及图像采集系统组成,图像采集系统包括工业相机、数据传输线路、图像采集软件等,主要技术参数如表5所示。 以土壤回填率为试验指标,根据离散元仿真试验优化后的作业参数进行田间试验,作业时,使用U形螺栓将开沟延时回土装置安装在播种单体机架上,播种单体通过三点悬挂机架挂接在拖拉机后悬挂处。设定开沟速度为1.6 m/s、开沟深度为30 mm,回土板转角为40°,试验结束后,使用取形器测量沟形,如图14所示。沟形示意图如图15所示,通过开沟延时回土装置作业后的沟形计算实际土壤回填率Y1,计算式为 表5 主要技术参数Tab.5 Main technical parameters 图14 沟形测绘Fig.14 Mapping of groove shape 图15 土壤回填率模型Fig.15 Soil backfill rate model (11) 式中S1——开沟后未回填区域面积,mm2 S2——开沟后回填区域面积,mm2 田间试验结果表明,土壤回填率为96.5%,变异系数为1.43%。对开沟延时回土装置和未安装回土装置的开沟器进行开沟回土性能对比试验,设定开沟速度为1.6 m/s、开沟深度为30 mm。对比试验效果如图16所示,试验结果如表6所示。 图16 不同开沟器作业效果对比Fig.16 Comparison of effects of different openers 由图16可知,两开沟器均能为工业相机采集种床中的种子图像提供避让空间和理想检测区域,但未安装回土装置的开沟器作业时土壤扰动量较大,土壤回填率较低,部分种床出现裸露的玉米种子,不利于种子萌发; 表6 开沟器类型及对比试验结果Tab.6 Opener types and comparison test results 4.3.1图像采集试验 图17 种床中的种子图像Fig.17 Seed image in seed bed 为验证上述关键装置设计确定的结构参数可以满足延长回土时间要求,为工业相机检测提供相对理想的工作环境,本文进行种子在种床中的原始图像获取实测试验。使用具有种床内种子图像采集功能的玉米播种单体进行田间播种试验,作业速度为1.6 m/s,图像采集帧率为60 f/s。采集图像如图17所示,观察图像可知,图像采集过程无回落土壤进入种床覆盖种子,导土装置长度范围覆盖相机视场,可以采集到种床中的种子图像,图像背景相对简化。试验结果表明,设计的结构可以有效延长土壤回落时间,避免回落土壤对检测效果的影响,实现原始图像的采集。 播种作业过程中,开沟延时回土装置破土会产生灰尘和飞溅的泥土,对工业相机采集种床图像造成影响,但观察采集图像发现,灰尘和泥土对图像采集效果影响较小,其原因为:①本文设计的导土板和开沟器主架,以及导土板上方的顶板形成了半包围结构,将工业相机包裹,保护工业相机免受飞溅泥土的干扰。②扬尘主要影响进光量,导致图像出现噪声,但当相机与目标距离较近,且进光量充足时,扬尘对图像采集的影响较小。本文图像采集过程中,相机与目标种子之间距离hD仅为157 mm,进光量充足。因此,田间作业扬尘对种床中种子图像采集影响较小。 4.3.2作业速度对图像采集效果的影响 为进一步验证所设计结构的作业性能及作业速度对图像采集效果的影响,以开沟速度v为试验因素,在播种作业过程中进行图像实时采集试验。试验设置采集帧率f1=60 f/s,每次作业采集图像数量n1为1 000帧,作业速度分别为1.6、1.9、2.2 m/s。 图像采集结果表明,当作业速度达到2.2 m/s时,本文设计的延时回土装置仍能保证图像采集时免受回落土壤的干扰,可以满足常规速度作业时的图像采集需求。 观察采集图像发现,随作业速度增加,种子图像出现畸变现象,即相较于原始形状,图像中的种子被拉长,如图18所示,且作业速度越快,畸变现象越严重。 图18 不同开沟速度种子图像畸变情况Fig.18 Seed image distortion at different operation speeds 4.3.3YOLOX目标检测效果 试验共采集图像3 000帧,其中有玉米种子图像共1 736帧。将所得包含玉米种子种床图像,按照8∶1∶1的比例划分为训练集、验证集和测试集。使用COCO和VOC数据集上的初始化YOLOX的网络参数,训练YOLOX目标检测模型,得到最优权重文件。使用基于最优权重文件的YOLOX目标检测模型,进行种床图像中的种子目标检测检测,测试检测精度并计算满足YOLOX目标检测模型的最大作业速度vmax,计算式为 (12) 其中 式中vmax——最大作业速度,km/h tY——单帧图像检测时间,ms 结果表明,YOLOX目标检测模型可检测出种子目标,平均检测精度为95.2%,满足检测要求。单帧图像检测时间tY≈30 ms,以此时间计算,vmax=14.2 km/h,满足当前绝大多数玉米播种机的作业速度要求。 (1)设计了延时回土开沟装置,通过导土装置和回土装置的配合作用,在保证土壤回填率的基础上,有效延长了回土时间,解决了土壤回落覆盖种子,影响种床中种子的图像采集的问题。 (2)通过离散元仿真试验,获得开沟延时回土装置作业参数最优组合为开沟速度1.6 m/s、开沟深度30 mm、回土板转角40°,影响土壤回填率的因素显著性顺序依次为:开沟深度、开沟速度和回土板转角。 (3)设计具有种床内种子图像采集功能的玉米播种单体,进行土壤回填率田间试验及种子图像采集试验,结果表明,最优参数组合下,土壤回填率为96.5%,开沟延时回土装置较未安装回土装置的开沟器土壤回填率提升39.6个百分点;
当压种辊直径d1过小时,与地面接触面积减小,驱动其转动的摩擦力相应减小,导致转动副失效,压种辊随机器拖动滑移,改变种子位置[19-21],基于以上分析,综合考虑安装空间,最终确定压种辊直径d1为30 mm。3.1 离散元仿真模型构建

3.2 开沟回土作业过程分析
同时导土装置进入土块A中,防止土壤颗粒回落进入种床,大量土壤颗粒被推向种沟两侧,土块A中土壤颗粒数量大幅减少,形成种床。回土前期阶段,如图10d所示,t1时刻,回土板开始进入土块A,推动土块A两侧的土壤颗粒进入土块A,覆盖种子,土壤颗粒数量增加。回土完成阶段,如图10e所示,随机器前进,回土板开始离开土块A,此时会将部分土壤颗粒推出土块A,导致土块A中土壤颗粒减少,随后趋于稳定,回土完成,此时土块A中颗粒数量为W2。

3.3 土壤回填率仿真试验
根据玉米播种农艺种植要求,开沟深度取30~50 mm;
根据仿真预试验结果,回土板转角取30°~50°,采用Design-Expert 10.0.7软件中的Box-Behnken方法,确定试验因素及编码如表2所示,试验方案如表3所示,X1、X2、X3为编码值。




其余项均不显著。3个影响因素对土壤回填率影响由大到小为X2、X1、X3,即开沟深度、开沟速度和回土板转角;
失拟性检验P>0.1,回归模型极显著且失拟项不显著,回归模型有效。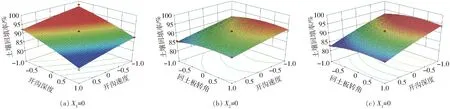
4.1 试验准备

4.2 土壤回填率田间试验

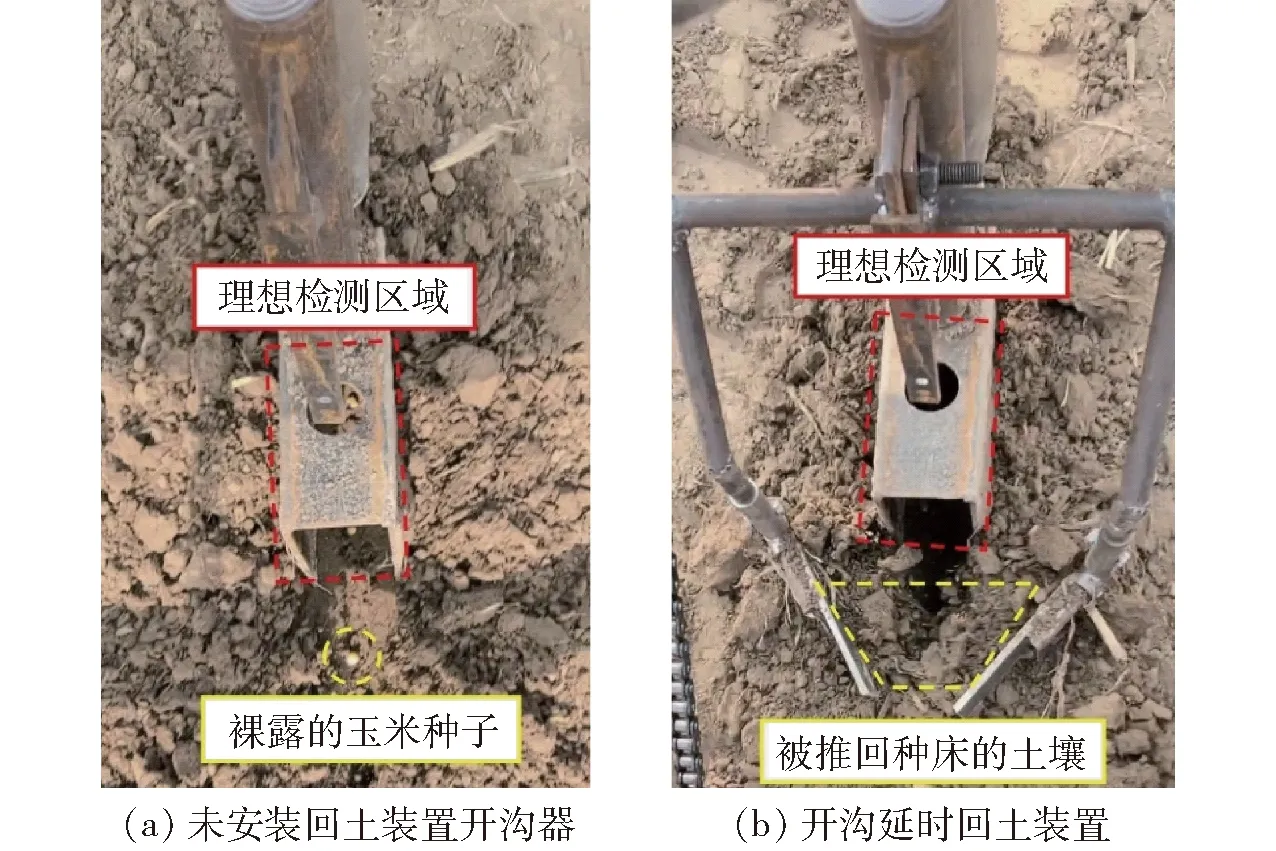
开沟延时回土装置作业时土壤被回土装置推回种床覆盖种子,既为原始图像获取提供了硬件基础,又保证了开沟器的土壤回填性能。由表6可知,延时回土开沟器较未安装回土装置的开沟器土壤回填率提升39.6个百分点。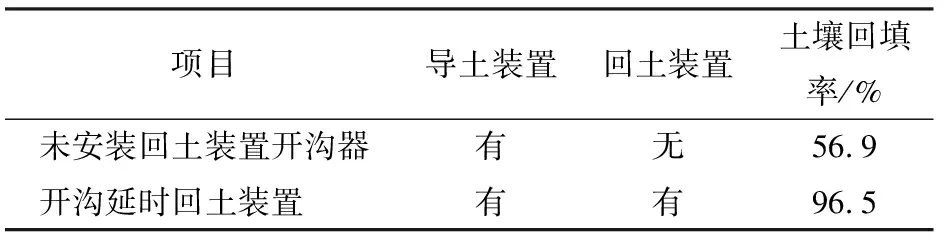
4.3 图像采集及目标检测试验

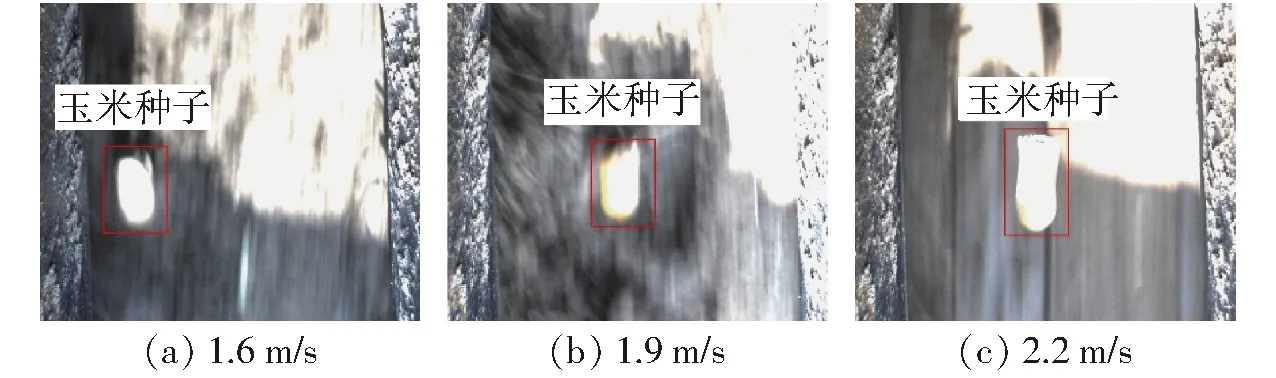
图像采集试验表明结果,所设计结构可以有效避免回落土壤对图像采集的影响,满足常规速度作业时的作业需求,实现原始图像的采集。