陈 力
(中国飞行试验研究院,西安 710089)
直升机飞行品质标准中对横航向模态特性评价提出了明确要求,一般通过参数辨识方法建立横航向飞行动力学模型,从而获得横航向模态的固有频率和阻尼比。早在20世纪80年代,国外就开始了直升机动力学模型参数辨识方法研究[1-2]。美国航空航天局开发了一套频域辨识软件CIFER,并成功地辨识了包括UH-60、CH-47、BO-105、AH-64D直升机及XV-15无人倾转旋翼机的飞行力学模型[3]。国内,孙涛、宋彦国等[4-7]提出了一种将机理建模和辨识建模相结合的辨识方法,并用该方法获得了模型直升机悬停时的状态空间模型。顾冬雷等[8]基于频域辨识方法获得了模型直升机的传递函数模型。吴建德、周健、刘尊和武梅丽文等[9-12],对小型无人直升机飞行动力学模型系统辨识方法进行了研究。
本文针对直升机试飞数据特点,利用线性调频Z变换、多输入输出频率响应计算和相干系数加权融合多窗口频率响应等方法,提高了频率响应计算的精度;
利用状态子空间方法和输出误差方法获得直升机横航向动力学模型中的未知参数值。通过某型直升机试飞进行验证,结果表明本文方法获得的模型仿真与试飞数据基本一致,达到了商用软件CIFER辨识结果精度,具有良好的工程应用价值。
针对直升机试飞数据振动噪声大的特点,本文采用修正的平均周期图法进行频率响应计算。该方法需要对数据进行分段加窗,窗口函数选择汉宁窗。为了增加分段数据的个数,减小振动噪声的影响,使相邻加窗数据之间重叠80%。为了细化横航向动力学模型关注频率范围的频率响应,本文采用线性调频Z变换,该方法可以指定时频转换的频率范围[13]。
对于单输入单输出系统,频率响应和相干系数计算参见公式(1)和公式(2)。
式中,H(f)为频率响应,γ2uy为相干系数,Gu(yf)为输入输出互谱,Gu(uf)、Gy(yf)分别为输入和输出的自谱,计算公式参见公式(3)和公式(4)。

式中,Guu,i(f)、Guy,i(f)分别为第i段数据的自谱和互谱,计算公式参见公式(5)和公式(6)。
式中,U(if)、Y(if)分别为第i个分段加窗数据的频域数据,(f)与U(if)互为共轭。
本文目的是辨识直升机横航向动力学模型,直升机的横航向动力学响应为典型的多输入多输出系统,不能直接采用单输入单输出系统方法计算频率响应。多输入多输出系统可看成多输入单输出系统的集成,对于多输入单输出系统,通过公式(7)进行频率响应计算[14]。

对于两输入单输出系统,频率响应计算公式如公式(8)和公式(9)所示。
数据分段加窗作为一个标准的谱分析方法在前面已经介绍,该方法是用于降低谱估计中的随机误差,但是不同的窗口尺寸对最终的谱估计结果影响不同。对于较大窗口长度,辨识的有效最小频率就降低了,因此在所关心的低频范围可以获取更丰富的信息。然而,窗口的数量也随之减少,这意味着在谱计算中可用于平均的窗口减少,导致随机误差增大。幅值和相位曲线的震荡也会增加,特别是在高频。这是因为高频区的信噪比比较低,也需要更多的数据窗口进行平均。较小窗口意味有更多的窗口可以用于平均,可以降低随机误差。这一般可以提高高频区的辨识精度。但是,导致了关心的低频段信息内容减少了。在辨识小阻尼模态时,小的窗口还会引起频率响应分辨率低,甚至导致小阻尼模态不可辨识的问题。
为了综合不同时间宽度窗口的优点,利用相干系数的函数对不同时间宽度窗口计算的自谱、互谱进行加权,以获得关注的全频率范围内质量都好的频率响应[14]。

式中,Wi表示第i个窗口的加权函数,εr()i表示第i个窗口下频率响应的正则化随机误差,εr()min为所有窗口中频率响应正则化随机误差最小值,T为数据时间长度,Twin为窗口的时间宽度。
利用公式(14)~公式(16)计算加权后的自谱和互谱,并利用加权后的谱和互谱计算频率响应和相干系数。


辨识模型采用线性化的小扰动横航向动力学方程,如公式17所示。

式中,u0、w0、θ0和φ0为飞机配平的速度和姿态角,g为重力加速度,状态矩阵和控制矩阵中其他参数为待辨识参数。
由于状态子空间法的主要过程中不含非线性寻优过程,所以具有很好的数值鲁棒性,不会出现基于非线性寻优辨识算法(如极大似然法、非线性最小二乘法等)所容易出现的局部最小现象。本文利用状态子空间方法获取未知参数的初值,具体过程见参考文献[11]。
根据相干系数不小于0.6原则选择可用于参数辨识的频率响应的频率范围[14]。通过数据分析发现,满足上述要求的不同输入/输出之间频率响应数据的频率范围不同。为了解决该问题,本文首先辨识不同输入输出之间的等效传递函数模型;
然后计算等效传递函数模型相同频率范围的频率响应,将其作为状态子空间的辨识数据进行未知参数初值辨识。该处理方法可以仅利用相干系数大于0.6的频率响应数据进行辨识,避免了质量不好的频率响应数据导致的辨识发散问题。
以本文方法计算试飞数据的频率响应作为辨识数据,利用输出误差方法进行未知参数辨识,获得最终辨识结果。
利用某型直升机试飞数据对本文方法进行验证,采用横向杆δLAT和脚蹬δPED扫频数据进行横航向动力学模型进行辨识。针对δLAT扫频数据,将输出ν、p、r和φ对δLAT的频率响应用于辨识,对于δPED扫频数据,将输出ν、p、r和φ对δPED的频率响应用于辨识。
利用上述方法计算该飞行试验数据的频率响应,典型的频率响应的幅值、相位和相干系数如图1和图2所示。

图1 通道p/δLAT的频率响应
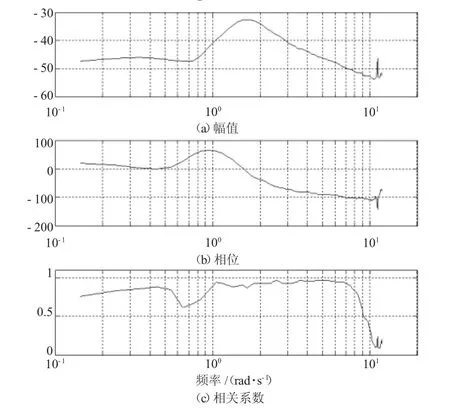
图2 通道r/δPED的频率响应
首先辨识不同通道的传递函数模型,计算上述所得传递函数模型0.1~12 rad/s的频率响应,并把其作为状态子空间法的辨识数据辨识得到初始次优状态空间模型,然后用从飞行试验数据得到频率响应作为辨识数据,利用输出误差法对初始模型进行优化得到最终模型,辨识结果如下所示。

本文方法辨识结果的特征值、固有频率和阻尼比与商业软件CIFER辨识结果的特征值、固有频率和阻尼比基本一致,见表1。
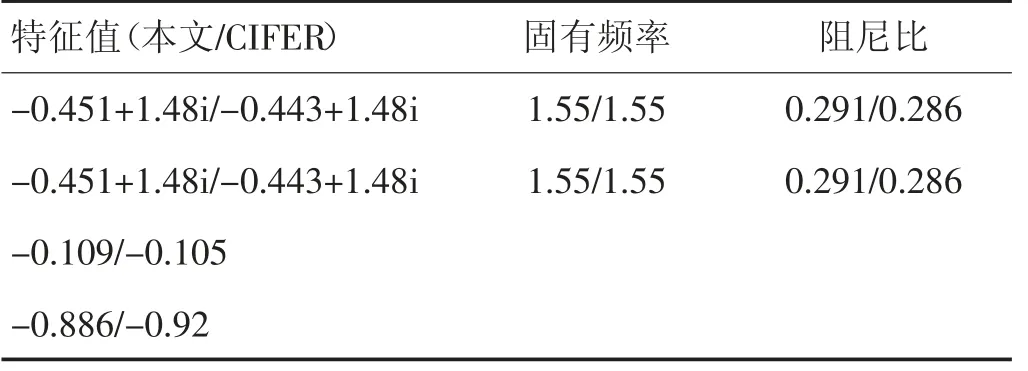
表1 辨识所得模型的特征值、固有频率阻尼比
辨识模型的验证方法有多种,本文采取未用于辨识的非相似数据(纵向倍脉冲数据)进行验证,其验证结果如图3所示(对验证数据进行和辨识数据同样的处理)。
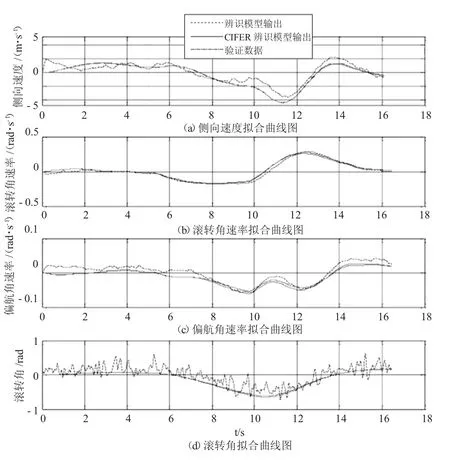
图3 辨识结果拟合曲线图
图中点隔虚线为实际的试飞数据,虚线为本文方法获得的模型计算的输出,实线为商业软件CIFER获得模型计算的输出,由图可知,本文方法和CIFER软件的辨识模型计算的飞机响应与实际试飞数据基本一致,且本文方法所得的模型和CIFER所得模型基本一致(虚线和实线重合),说明本文方法获得的模型和商业软件CIFER获得的模型具有相当的精度。
(1)针对直升机试飞数据振动噪声大的特点,利用本文所述的频率响应计算方法获得了全频段质量好的频率响应数据;
(2)利用某型直升机试飞数据进行验证,结果表明本文所用方法获得的模型可以准确描述某型直升机横航向动力学响应,且与商业软件CIFER得到的模型具有相当的精度。
猜你喜欢 频率响应航向直升机 直升机?环球时报(2022-09-15)2022-09-15风浪干扰条件下舰船航向保持非线性控制系统舰船科学技术(2022年10期)2022-06-17直升机小猕猴学习画刊(2022年12期)2022-02-06知坐标,明航向新世纪智能(高一语文)(2021年3期)2021-07-16考虑几何限制的航向道模式设计民用飞机设计与研究(2019年4期)2019-05-21研究1kW中波发射机频率响应的改进消费导刊(2018年8期)2018-05-25一种测量交流伺服系统扰动频率响应方法制造技术与机床(2017年8期)2017-11-27从不同的视角理解相位响应曲线演艺科技(2017年3期)2017-05-03基于干扰观测器的船舶系统航向Backstepping 控制电子制作(2017年24期)2017-02-02基于频率响应法的变压器绕组变形试验分析电子技术与软件工程(2015年6期)2015-04-20