张恒昌,张 然,樊元义,张天宇,褚金奎
(大连理工大学机械工程学院,辽宁 大连 116023)
随着光学成像技术的发展,全息显示技术诞生,并成为了记录物波所携带的物体的强度信息与相位信息的主要实现方式,一直到激光器的发明和广泛应用,光全息显示技术得到了迅速的发展,以其具有存储信息量大、高对比度、制作成本低等优点,在全息光刻[1-4]、信息存储[5-6]、全息显影[7-8]等多方面都有着广泛的研究和应用。
随着数字计算机与计算技术的迅速发展,人们广泛地使用计算机模拟、运算、处理各种光学过程,计算全息技术的出现取代了使用传统的光学记录材料进行定影、显影的操作的全息显示方式,成为三维全息显示的主要实现方式。现如今,广泛使用的三维全息显示方法是通过使用SLM空间光调制器加载通过计算机生成好的完全记录目标3D物体的全波信息计算全息图,经激光照射SLM以还原目标图像的波前而得到全息像的方式。
三维计算全息图主要有点源法[9-10]、层析法[11-12]等生成方式,点源法的基本原理就是通过将目标三维物体看做有限个点组成的集合,物体的分辨率和组成该物体的点集合的数量有关,取点越多,成像物体的还原程度和细节越接近目标物体,即成像质量越好。但是同样的点的数量越多也使得在生成三维物体全息图的计算量越大,对于结构复杂且点集合多的目标物体有时计算一张全息图甚至需要数个小时的时间,这显然不利于全息实时显示的应用。所以很多的关于点源法的研究主要在提高其计算效率上,其中1993年,LUCENTE[13]提出基于查找表(LUT)加速全息图计算的方法,通过预先采集点并存储到计算机的方式来加快全息计算速度。之后,KIM等[14]在LUT的基础上利用空域卷积提出一种新型查找表(NGLUT)法和新加坡学者PAN等[15]提出分离查找表(SGLUT)算法,上述两种方法都对LUT进行了优化进一步降低了预设点所占用的计算机存储空间。同时随着计算机技术的发展,各种并行计算方式也成为了点源法提高全息计算速度的主要方式。尽管点源法生成全息图的速得到了很大的提高,但是通过预存储占用大量计算机存储空间和并行计算占用计算机的CPU资源的方式来提高了生成全息图的速度,对计算机的使用有了更高的要求和消耗,很大程度上限制了该方法使用。另一种是基于多边形法的方法该方法在每个多边形的计算速度上和计算点源法计算点的速度差不多[16],所以多边形法在速度上要优于点源法,但是在多边形建模的过程中相比于点源法要更加繁琐。而另一种基于层的方法,是通过将一个完整目标三维物体进行多层分割,每一层的计算速度都比较快,还原物体的分辨力限制只有层数的多少。这样该方法可以在保证图像质量的同时,计算速度也很快。但是,层析法在对目标成像物体进行分层划分后,实际就是对每一层的二维图进行全息计算,计算生成的平面全息图通过叠加就形成一幅需要的目标三维物体全息图,在还原后,就会出现衍射造成分层混叠和图像串扰的问题,对成像质量造成很大的影响。所以解决该问题对于提高三维全息成像质量有着重要的意义。
在本文中,提出了一种应用球面波衍射为核心并使用传统相位优化方法GRECHBERG-SAXTON(GS)算法[17]改进的优化方法3D-GS相关算法[18-19]进行相位优化,提升成像质量,解决了使用层析进行全息成型后,导致的分层混叠和图像串扰的问题。该方法是在计算目标三维物体时,将三维物体首先解析成若干个平行平面。对于每个分割图形平面中的每个像素,都当作为空间中一个发光物点,该物点光波以球面波的形式发散传播到空间距离z的位置平面处。同样的层析平面每个像素都看做相似的形式进行计算。通过计算叠加就可以得到一个距离层析物平面z距离处的衍射平面。该衍射平面通过一束离轴干涉光照射,就形成了一幅记录层析物平面全部振幅信息的计算全息图,对得到的计算全息图,使用GS算法经过多次迭代计算。就得到优化后的目标物体全息图。通过仿真实验验证了该方法在解决分层成像混叠串扰问题的可行性。
1.1 球面波衍射理论方法
球面波的等相位面是球面,通常情况下,定义一个空间点光源,当该点光源与该点发出的球面波的中心重合的时候,可以得到光传播的球面波表达式为:

式中:u(x,y,z,t)为光波传播到一定空间距离位置处光场强度;
U0为源光点的幅值大小,是一个常数值;
k为波矢;
r为光波传播的距离。
其中r可以表示为:

如果球面波中心与源点重合,光波沿着z轴方向进行传播,那么上式中的z=z0,通过相位因子表达式可以知道,当目标传播区域较小,相对于实际研究区域的尺度,激光波长很小,r的微小变化会引起相位的较大变化,所以r可以表示为:

如图1所示,球面光波传播到z距离的平面一点(xc,yc,zc)的时候,球面波表达式为:
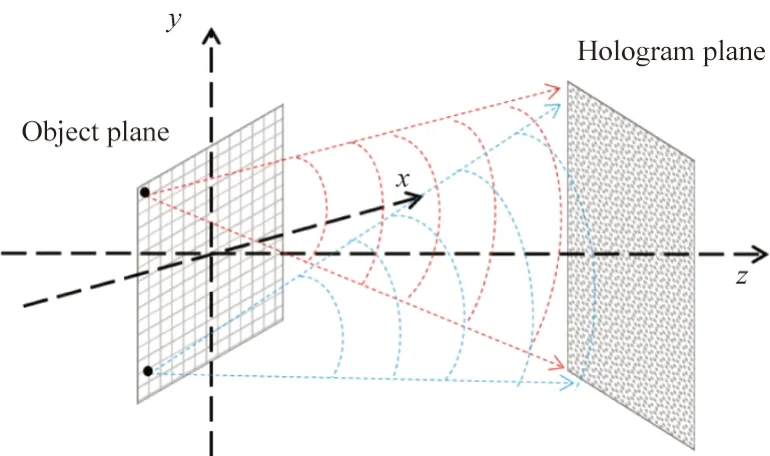
图1 应用球面波计算平面点集合传播原理

式中:U(xc,yc,zc)为光波在点(x0,y0,z0)处在空间传播到点(xc,yc,zc)处的球面波强度;
U0为目标位置的幅值大小;
exp(jk|zc-z0|)对光波场的相位不产生影响,通常可以忽略。
使用式(4)计算单层目标图像干涉图样后,为了形成能够记录该图样的全部振幅信息,还需要使用共轭参考光束和源光波进行干涉,干涉后形成的图像就得到了完整的全息图。
得到全息图后,就可以通过衍射计算得到相应的重建像,这里假设衍射得到其中一个衍射平面的距离为zi,那么此时得到的该重建像面的光强Uf(x,y,zi),提取对应的迭代相位为φi,重新给原图像添加该对应的相位:

式中:U0为初始振幅大小。
通过式(5)重建进行全息图的计算。上述即为完整的迭代计算过程。
球面波的使用可以充分利用DMD空间光调制器的衍射原理,使得经过空间光调制器微镜反射的光束在各个方向的反射强度一致,根据DMD空间光调制器的原理,DMD芯片是由数百万个小微镜组成,每个微镜呈对角线进行偏转,所以入射光线必须以DMD微镜对角线方向进行入射,所以对于参考光束如平面示意图如图2~3所示。

图2 应光源入射DMD示意图
图2所示为DMD芯片及激光入射角度,根据DMD芯片中微镜结构,其中虚线所示为DMD芯片微镜的偏转对角线,对于其中一个微镜设其平面坐标位置为(x0,y0),其中的L1=x0cosθ,L2=y0sinθ,结合图3所示的单微镜光线入射示意图,红色线段长度为L=x0cosθy0sinθ。为了使得入射光照射在DMD芯片的每个微镜上保持其入射光相位相同,理想状态的入射光为平行光。由于微镜位置及光线倾斜入射导致的相位差。因此可以进行相应的计算相位投影为L4=sinβ(x0cosθ-y0sinθ)。所以参考光波可以由下式进行表示:
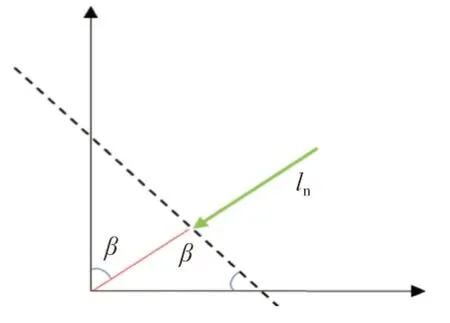
图3 光源入射单微镜示意图

式中:(x,y)为参考光波幅值;
β为微镜对角角度;
θ为光波入射DMD芯片角度。
设物光场振幅的归一化值定义为参考光的振幅Ar为:

式中:U为全息面出的目标物体衍射光场;
Umax为衍射光场最大值;
Umin为衍射光场最小值。
最后可以得到参考光波的最终表达式:

通过调节光束比,并使得参物光进行干涉,于是在全息图纪录面上的光强为:

式中:I(x,y)为参物光干涉后的光强;
(x,y)为参考光幅值大小;
U(x,y)为光幅值大小。
通过干涉就可以最终形成记录有原始物体全部振幅及相位信息的平面全息图。
相比于平面波计算,使用球面波在进行全息计算和再现时,一就是对于成像大小方面,参考光和源点光都为平面波时,只能改变像光波的方向,即改变像的位置;
若为球面波,就可以改变像光波的曲率,即改变像的大小。二是该算法生成的全息图的还原像不存在其他级次的衍射干扰像。三是在使用球面波进行衍射成像时,在成像距离较近并且成像面较小时,球面波衍射形成的全息成像质量相比于平面波更加出色。
1.2 3D-GS算法应用原理
在成型图像优化上,使用了3D-GS算法,GS算法是用于求解相位全息图的一种方法,通常使用该方法求解逆源问题。所谓的逆源问题就是根据所期望的光场衍射分布求出期望的相位原始分布的问题。3D-GS算法就是使用GS的基本思想进行三维光场相位优化的一种方式。图4所示为本文迭代优化原理图。

图4 3D-GS迭代原理
首先将三维目标图像进行分层处理,针对于单层图像赋予随机相位并使用球面波衍射计算出对应全息图,若干单层全息图叠加就生成了目标全息图,并使用对应衍射方式进行还原像计算,提取对应还原像的相位值做为初始单层图像的相位,重复上述计算过程,完成迭代优化过程。
为了体现GS迭代的过程中对于还原图像的优化作用。根据3D-GS算法原理进行单幅全息计算,如图5所示,(a)(b)(c)分别为使用迭代计算的原始图像、全息图以及重建像。图6则为在不同迭代次数下的图5中不同还原图像部分像素行的灰度分布折线图。因为进行的是振幅全息构建,所以灰度在构建上等同于实际的光强表现,从图中可以看出,随着迭代次数的增加,在初始1次迭代后生成的还原图的在第15、16、17行的灰度分布上存在较大的数值波动,相比之下在50迭代的情况下,在主要的成型区域部分,灰度值已经区域整体稳定的状态。

图5 迭代全息计算像
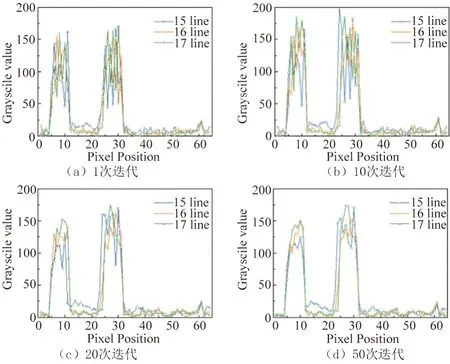
图6 迭代结果光强分布对比分析
2.1 仿真实验光路及结果
图7所示为仿真系统实验光路图,系统整体为不采用透镜式全息成像系统。系统组成包括532 nm绿光激光器作为源光源、扩束镜用于消除激光高斯干扰使得出射激光变成均匀的平行光束、DMD空间光调制器使用的是最高分辨率为1 920 pix×1 080 pix的DLP数字微镜DMD空间光调制器,该空间光调制器采用光强调制、通过配套的全息图加载软件使用计算机用于将生成的好的计算全息图加载到DMD空间光调制器中、成像白板用于衍射还原像观察。

图7 全息显示系统光路
为使用该算法加载图8中4张原始图片进行20次迭代重建得到的还原图像,如图9所示,设定衍射距离为d=50 mm,全息图大小为512 pix×512 pix,还原像大小为64 pix×64 pix,每张图片的间隔距离为4 mm。通过还原像可以看出,使用该算法计算层析法生成的还原像在各层之间的相互干扰和混叠较小,还原像较为清晰。

图8 单层原始图像

图9 各层全息重建像
2.2 仿真实验结果分析
对于层析法进行计算全息显示像时,使用菲涅尔衍射法在进行全息计算的时候,其是存在z方向的最小传播距离极限的限制:

式中:Δ2x为沿着x方向的采样周期;
M为x方向上的采样数;
λ0为波长。
式(10)为采用菲涅尔法计算衍射场的z方向传播距离极限公式,超过该距离时就会因为混叠效应产生误差,影响成像质量。由上述仿真结果可以看出,球面波迭代算法求解方式则不存在相应的限制。在更短衍射距离位置处,重建像质量仍然有较好的表现。
此外,使用本文的方法在进行短距离成像显示时,可以获得较大像面的清晰像。对于使用菲涅尔方式计算的情况下,其生成的最大还原像面为:

式中:Nx为x方向上的采样点数;
λ为波长;
d为衍射距离;
Lx0为物面实际空间长度。
由式(11)可知,该菲涅尔算法主要适用于预设距离d较大的情况。相对于本文提出的方法则可以实现在短距离大尺寸成像,如图10所示,为使用球面波迭代算法的方式生成的不同大小的全息图的还原像。其中全息图的大小为512 pix×512 pix,光源为绿光光源波长为532 nm。衍射距离为30 mm,提供过改变还原像面的尺寸分别进行全息计算由图10所示,可以看到,这样的近距离衍射成像的情况下,形成的重建像的长宽尺寸可以实现在150 mm以上依然能够保持良好的清晰度。在200~300 mm长宽大小尺寸时依然可以得到仅仅是边缘模糊的重建像。相比于菲涅尔衍射实现的全息重建像存在的大小限制和其适用于较远距离成像的特点,本文提出的全息算法在重建像大小范围上表现出更好的重建性能。

图10 全息图及不同尺寸重建图像
同时为了提高该算法计算速度,使用了CPU多核并行计算方式,在本文仿真实验中,使用并行计算环境为Inter i9-2080RTX的计算机,支持最大并行计算数为48线程,如表1所示,该算法进行不同的程度的迭代次数下获得还原像所需时间及重建图像质量的对比,其中衍射距离50 mm,还原像面大小64 pix×64 pix、全息图大小512 pix×512 pix固定不变。通过在不同迭代次数下重建时间对比可以了解到,使用并行计算的情况下,在多迭代次数下进行全息计算提升速度效果显著。同时通过图像质量评价指标PSNR值可以得到随着迭代次数的增加,PSNR值逐渐增大,表示重建像质量也会有所提高。

表1 不同迭代次数下重建时间及图像质量对比
本文提出了一种基于DMD空间光调制器微镜结构并使用球面波衍射配合3D-GS相位优化的三维全息显示方案,该方法优化了三维全息显示方法中的传统层析法进行三维像重建后各层还原像之间可能会出现的层间像串扰和混叠的问题,相比于菲涅尔及傅里叶求解方式相比,还原像显示不需要进行复杂的衍射干扰像处理。仿真实验结果表明,本文提出的方法在进行三维全息显示重建后不仅能够解决分层还原像出现层间串扰和混叠的问题,同时能够在较大范围还原像面尺寸上保持良好的成像质量。并且该种方法的实验光路组成简单,实现方便,为层析三维全息显示的研究提供一种良好的解决方案。
猜你喜欢 全息图光波调制器 光强比和曝光时间对傅立叶变换全息图的影响科学技术创新(2021年28期)2021-10-20北斗三号射频芯片中Σ-Δ调制器电路设计导航定位学报(2021年3期)2021-06-19一种新型的级联Sigma-Delta调制器的建模设计合肥工业大学学报(自然科学版)(2020年7期)2020-08-05基于锁相环技术的振荡器稳频调制器仿真研究电子制作(2019年15期)2019-08-27可碰触3D全息图商业文化(2017年28期)2017-11-01能触摸的全息图发明与创新·中学生(2015年9期)2015-09-05一种用数字集成电路FPGA实现的伪速率调制器空间控制技术与应用(2015年4期)2015-06-05纳米材料应用浅析科技与创新(2014年13期)2014-09-02计算全息图的基本理论与制作*光学仪器(2012年1期)2012-01-21