翟禹尧,史贤俊,韩 露,秦玉峰
(海军航空大学岸防兵学院 烟台,264001)
多信号模型是最广泛应用的测试性模型,但其缺点是系统之间的内在联系[1]不能完整地表达出来,具体表现为:仅用0 和1 描述系统故障与测试之间的关系,忽略测试不可靠、延时性等有用信息,该建模方法存在局限性。现有模型对复杂系统进行建模会导致分析结果不全面[2],具体表现为:系统故障原因具有多样性、模糊性及偶然性,而故障与故障之间存在复杂的逻辑关系,现有模型并不能对上述分析进行有效描述,也不能动态描述故障的产生及诊断过程,缺乏灵活性,最终导致模型不够完备,所建模型与实际模型误差较大。
Petri 网是目前用来故障诊断的一种方法,既能表现系统的状态,又能描述系统的行为[3]。目前用来故障诊断[4]的Petri 网可分为两类,故障Petri 网[5]和随机Petri 网[6]。王瑶[7]对四性工作开展了深入研究,采用Petri 网建立四性一体化模型,虽建立系统测试性模型,但主要针对四性进行分析,测试性模型研究不够深入。文献[8]提出采用广义随机Petri 网对系统进行测试性建模,,不仅将现有模型与Petri网模型的优缺点进行了对比,还对复杂系统进行了分层建模。FPN 属于故障Petri 网的一种,不仅能够描述系统的状态,还能够采用模糊推理描述故障征兆和故障之间的对应关系。文献[9]采用加权模糊Petri 网(weighted fuzzy Petri net,简称WFPN)对电网进行了故障诊断,取得了不错的效果。
在文献[8]工作的基础上,将FPN 与系统级测试性模型相结合,完成由系统到子系统的传递。只需知道装备的FMECA 信息,就可以建立模型进行分析,该模型不仅考虑了系统结构特性,且能够处理复杂的故障传播过程,具有严格的数学推理算法,可以将故障的传播过程定量转化为数学方程。根据系统测试性模型得到测试性指标,指导装备的机内测试(build in test,简称BIT)设计,根据子系统的FPN模型实现对故障的精确定位以及故障的预测。
1.1 FPN 的定义
定义1一个FPN 由一个十一元组构成[9-10],记为FPN=(P,T;
D,I,O,M,W,α,F,λ,U),其 中:P={p1,p2,…,pn} 为有限库所集合;
T={T1,T2,…,Tm} 为有限变迁集合;
D={D1,D2,…,Dn} 为命题的有限集合,|P|=|D|,P∩T∩D=∅;
I:T→P∞,为输入矩阵,反映变迁到库所映射的矩阵;
O:T→P∞,为输出矩阵,反映库所到变迁映射的矩阵;
M=(m1,m2,…,mn)T表示库所标识分布向量;
W=(ωij)为库所权值n×m矩阵;
α=(α1,α2,…,αn)T为库所置信 度n维向量;
λ=(λ1,λ2,…,λm)T为变迁点火的阈值向量;
U=diag(μ1,μ2,…,μn)为变迁规则可信度矩阵;
F为一有向弧的集合,F⊆(P×T)∪(T×P),×为笛卡尔积。
定义2在模糊产生式规则中,如果其前提条件或结论中存在“and”,“or”,称此规则为合成式规则。本研究涉及两种规则类型如下

其中:d为结果命题。
1.2 FPN 的参数学习
权值等参数源于专家的经验和装备的历史数据,存在着不准确和无法学习的问题,很难转化为具体的模糊值。采用BP 神经网络进行参数学习,从而优化故障诊断模型。
神经网络对FPN 参数训练算法,以权值为例进行论述。初始化误差阀值、迭代次数和学习率,步骤如下。
1)将学习样本进行归一化处理,以建立规范的样本。
2)建立如图1 所示的神经网络模型,包括输入节点I、隐藏节点M和输出节点O。其中:I与样本数相同;
O根据故障数来确定;
M可以根据式(1)来确定
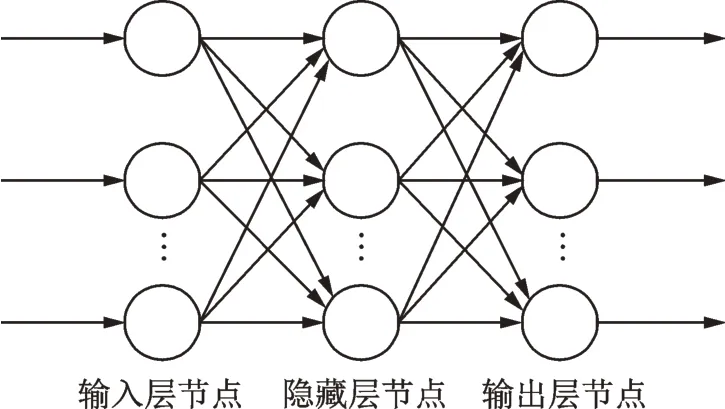
图1 3 层BP 神经网络模型Fig.1 Three-layer BP neural network model

其中:C为1~10 之间的一个随机常数。
3)对步骤2 的模型进行训练,得到权值等参数的初始值。
4)误差函数如式(2)所示

根据window-Hoff 规则来修正权值,在第j次迭代中,调整权值的计算公式为

5)j=j+1,当j达到最大迭代次数,算法结束,权值可以通过式(3)获得,FPN 经过神经网络学习训练变成神经模糊Petri 网(neural fuzzy Petri net,简称NFPN)。
在进行故障推理之前,需要定义如下数学算子[11]。
1)比较算子▱:C=A▱B。A,B和C均为m×n矩阵,当aij>bij时cij=1;
当aij<bij时cij=0。其中:i=1,2,…,m;
j=1,2,…,n。
2)取小算子⊙:C=A⊙B。A,B和C均为m×n矩阵,cij=min(aij,bij)。
3)取大算子⊕:C=A⊕B。A,B和C均为m×n矩阵,cij=max(aij,bij)。
4)直乘算子*:C=A*b。A为m×n矩阵,b为n维向量,cij=aij·bi。
5)乘法算子⊗:C=A⊗B。A,B和C分别为m×q,q×n,m×n矩阵,cij=max(aikbkj)
2.1 正向推理算法
首先,根据FMECA 获取故障征兆信息,确定库所置信度;
其次,根据点火判别函数进行判断变迁的发生,根据关联矩阵(由输入矩阵和输出矩阵构成)进行故障传播的推理,以实现对故障的预测与防护[12]。
2.1.1 库所置信度推理
推理公式为

其中:O为输出矩阵;
U为变迁规则置信度矩阵;
W为库所权值矩阵;
α为库所置信度n维向量。
直到αk+1=αk时,推理结束,否则继续由αk推导得到αk+1。
2.1.2 变迁点火判别函数
首先引入Sigmoid 函数

其中:b为绝对值足够大的负常数,一般设定为b=-100。
因此,当X≥λ时,y(x)=1,表示变迁点燃;
X≤λ时,y(x)=0,表示变迁不点燃。
将其与变迁阈值进行比较可得

其中:Ck=[c1,c2,…,cn]T为变迁预使能矩阵;
cj=1表示第j个变迁满足点火条件;
cj=0 表示cj为潜在的使能变迁,根据库所中托肯的有无判断该变迁是否触发;
G(X)为X的列向量,G(X)=W·α。
根据NFPN 的点火触发规则,得Ck的推理公式
2.1.3 故障传播推理
在Petri 中,故障的传播过程可通过库所中托肯的变迁进行描述,正向推理算法将该过程定量转化为数学模型,其公式为

其中:K为Petri 网的关联矩阵[13]。
2.2 反向推理算法
反向推理与正向推理故障传播路径正好相反,反向推理直接从目标故障出发,推理出该故障的传播路径,并在NFPN 模型中找到导致这一故障的最小割集。若其有多个最小割集,则根据最小割集发生率进行依次排查。若最小割集G={p1,p2,…,pn},则最小割集故障发生率为

反向推理过程中的输入矩阵、输出矩阵与正向推理相反,它们的模型关系为:I-=O;
O-=I。
根据反向推理模式得到反向推理矩阵算法[13]为

其中:Ck-为第k次反向点火时的逆网变迁序列;
lm=(1,1,…,1)T为m维向量。
3.1 数据的获取
1)库所置信度:本研究根据文献[14]的方法,结合2.1.1 节的库所置信度推理公式以及历史统计数据设定初始库所置信度。
2)变迁置信度:μi是可信度值,μi∈[0,1],主要表示规则中前向库所引发后继库所的真实强度。根据历史数据,并通过统计处理确定模型的初始置信度。
3)库所权值:采用神经网络算法进行训练调节。权值的每一步调节都与误差的反向传播量有关,反向传播量如式(2)所示。
3.2 模型的构建
图2 为涡扇发动机本体功能框图,可以看出该系统由7 个部件组成,各个部件间紧密联系。表1 为风扇部件的FMECA 信息。首先采用文献[8]的方法建立该系统的测试性建模,如图3 中第1 层模型所示。表2 为测试性模型的库所和变迁的具体含义,表3 为FPN 模型的库所和变迁的具体含义,根据测试性模型得到相关性矩阵如表4 所示,求得故障检测率100%,故障隔离率为72%。根据FMECA 信息建立FPN 模型,如图3 第2 层模型所示。
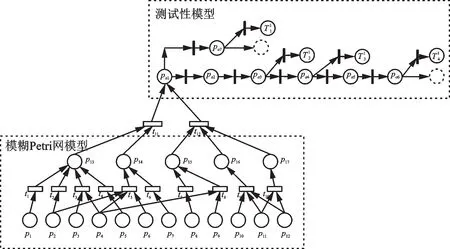
图3 测试性-故障诊断模型Fig.3 Testability-fault diagnosis integrated model

表1 风扇部件FMECA 信息Tab.1 FMECA information of Fan component

表2 测试性模型的库所和变迁的具体含义Tab.2 The specific meaning of the library and changes

表3 FPN 模型的库所和变迁的具体含义Tab.3 The specific meaning of the library and changes
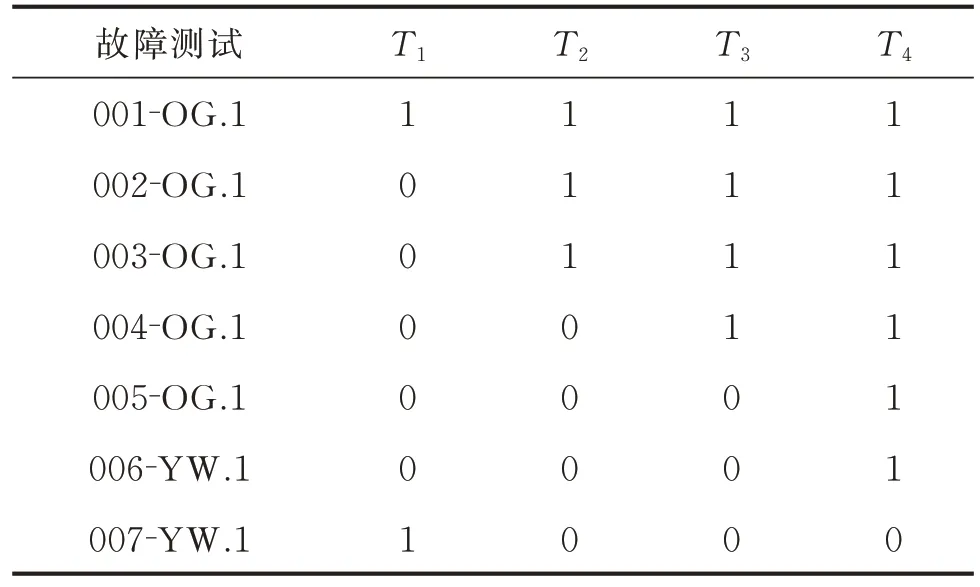
表4 相关性矩阵Tab.4 Correlation matrix
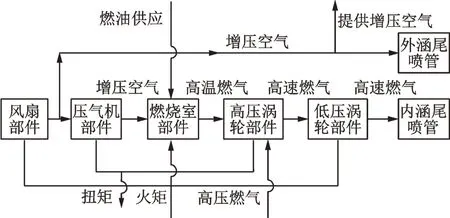
图2 涡扇发动机本体功能框图Fig.2 Functional block diagram of turbofan engine
根据测试性模型,在系统内部设置相应的测试点,为故障诊断奠定基础。笔者以风扇部件为例,进行故障分析。
4.1 初值的确定
根据2.1 节中所述的方法,借助于专家经验对模型中的各参数的初值进行确定。
初始库所置信度=(0.92,0.69,0.89,0.9,0.87,0.75,0.72,0.86,0.93,0.77,0.67,0.63,0,0,0,0,0,0)
变迁置信度U=diag(0.87,0.82,0.78,0.72,0.90,0.88,0.87,0.91,0.66,0.88,0.90,0.87)。
阈值λT=(0.5,0.5,0.5,0.5,0.5 0.5,0.5,0.5,0.5,0.5,0.5,0.5)。
本研究以叶片裂纹、变形或断裂p15、风扇轴裂纹或折断p17以及风扇部件故障pa1为例,对权值进行调节计算。理想权值设为ω4,8=0.6,ω9,8=0.4,ω11,10=0.5,ω12,10=0.5,ω15,12=0.6,ω16,12=0.2,ω17,12=0.2。最大学习步 数b=3 000,学习率η=0.02,E的允许误差为5×10-5。
经过2 861 步调节,E达到允许误差范围,得到ω4,8=0.64,ω9,8=0.36,ω11,10=0.48,ω12,10=0.52,ω15,12=0.54,ω16,12=0.24,ω17,12=0.22。
根据图3 中NFPN 的拓扑结构,可以得到输入矩阵I、输出矩阵O和权值矩阵W分别为

将O,U,W和α0代入2.1 节中的库所置信度推理 公式(4),经过Matlab 编程推理计算,直到α3=α2,推理结束,获得全部库所的置信度αT2=(0.92,0.69,0.89,0.9,0.87,0.75,0.72,0.86,0.93,0.77,0.67,0.63,0.80,0.73,0.83,0.46,0.59,0.61),并将其作为正、反推理的置信度数据。
4.2 正向推理
本研究假设检测到如下故障征兆:进气道出口流场畸变较大、叶片损伤、外物损伤和控制程序交叠。正向推理初始标识向量M0=(0,1,0,1,0,1,0,0,1,0,0,0,0,0,0,0,0,0)T,将α2代入式(7),得到变迁使能向量C0=(1,1,1,1,1,1,1,1,1,1,1,1)T。将初始数据和C0代入式(7),经过Matlab 编程计算,C4=C3,推理结束,得到如图4所示的正向推理结束时托肯分布,标识向量分布M3=(0,1,0,1,0,1,0,0,1,0,0,0,1,1,1,0,0,1)T。从图中可以清晰看出,风扇部件故障为故障征兆所引发的故障。

图4 正向推理结束的托肯分布Fig.4 Forward reasoning end token distribution
4.3 反向推理
首先,根据测试性模型以及相关性矩阵,在涡扇发动机内设置相应的BIT 电路;
其次,根据设置好的测试点进行检测。本研究假设BIT 检测出风扇部件发生故障,并以此进行推理说明分析。
由于引起风扇部件故障比较特殊,如图5所示,这里可以看出该故障由t11,t12两个变迁引发。G1={p13,p14},G2={p15,p16,p17};
f(G1)=0.765,f(G2)=0.623,据此可判别风扇故障是由t11变迁引发。但是实际检查发现风扇部件并没发生效率低和喘振现象,可以判断是由变迁t12引发。因此,得到其初始标识向量=(0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1)T,=(0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,1)T。将α2代入式(7),得到变迁使能向量=(1,1,1,1,1,1,1,1,1,1,1,1)T,并根据由变迁t12引发,推出=(0,0,0,0,0,0,0,0,0,0,0,1)T。
将I-,O-,,代入式(9),经过演绎推理,直到=,推理结束,得到可以引发风扇部件故障的全部库所,如图6 所示。标识向量=(0,0,0,0,0,0,0,1,0,1,1,1,0,0,1,1,1,1)T。
根据图5 中的事件关系,可求得引发风扇部件故障的最小割集:G3={p8},G4={p10,p11,p12},G5={p11,p12};
f(G3)=0.86,f(G4)=0.69,f(G5)=0.65。通过最小割集发生率,可以得到故障的诊断先后顺序为G3,G4,G5。当一个故障由多个故障征兆的库所引发时,例如G5,根据p11和p12置信度高低进行诊断。反向推理算法与传统故障检测方法相比,在提高检测效率的同时,还避免了检测过程中的盲目性和复杂性。

图5 反向推理结束的托肯分布Fig.5 Adverse inference end token distribution
5.1 正向推理验证
故障诊断领域常用的方法之一为故障树分析(fault tree analysis,简称FTA),笔者通过建立系统的故障树对正向推理进行验证。图6 是以风扇部件为例的故障树模型,事件含义如表2、表3 所示,其中p3和p4由或门连接之后与p1,p2,p5通过与门相连接。为了推理方便,将p3和p4由或门连接之后的隐藏事件用X1表示,X1无具体含义,只是方便叙述下面求解演算,类似的还有X2,X3,X4和X5。
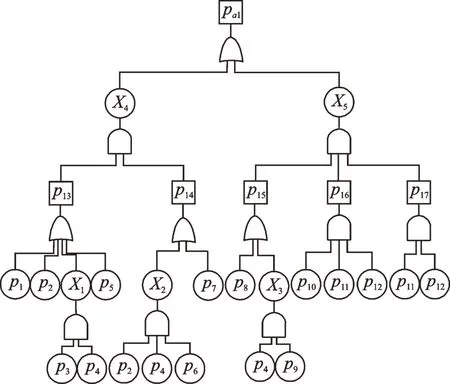
图6 故障树模型Fig.6 The fault tree model
将5.1 节中的置信度、权值和阈值等模糊信息引入故障树。以事件p2,p4,p6和p9为例,p2=0.69,p4=0.9,p6=0.75,p9=0.93。ω2,2=1,ω2,5=0.33,ω4,5=0.46,ω6,5=0.21,ω4,8=0.64,ω9,8=0.36。根 据1.2 节中的模糊推理算法,p2ω2,2=0.69 >0.5,p2ω2,5+p4ω4,5+p6ω6,5=0.80>0.5,p4ω4,8+p9ω9,8=0.91 >0.5。求解之后,p13=0.69,p14=0.91,p15=0.91,相应的权值ω13,11=0.58,ω14,11=0.42,X4=p13ω13,11+p14ω14,11=0.78 >0.5。p15,p16,p17通过或门连接,依据模糊产生规则,不满足继续传递条件。因此,由X4导致pa1风扇部件故障,与正向推理结论一致,验证了正向推理的正确性。
5.2 反向推理验证
表5 为某型号涡扇发动机2010—2019 年期间记录的风扇部件维修记录数据,进行统计处理后验证反向推理的正确性。

表5 风扇部件维修记录数据Tab.5 Fan component maintenance record data
表6 记录了风扇部件故障现象及故障原因等数据,该部件在这期间总共发生329 次故障。因为时间长、尚未妥善保存等因素造成部分数据损毁或丢失,为了数据的真实性和准确性,用“其他”原因表征这部分数据。根据表6 中的故障统计次数和库所置信度求取相关性系数,由相关性系数的高低判断反向推理的准确性。故障统计次数平均值=54.833,置信度的平均值=0.568,将二者代入式(10),得到r=0.899。

表6 故障记录相关数据Tab.6 Fault recording data

根据相关性定义可确定,推理结果与实际故障状态具有较强的相关性。
进一步与文献[15-16]进行对比来验证本研究方法的准确性。选取现场2 个案例,应用3 种方法进行分析。表7 为3 种方法对比结果,考虑实际工作情况,p9为控制程序必须检测。根据表7 能得到本研究与文献[15]具有相同诊断结果,稍优于文献[16]。文献[15]采用专家诊断系统和基于BP 神经网络的故障诊断模型,该方法诊断率高、针对性强,但是需要大量实际数据作为支撑,不同装备的数据获取难度不一样,难以推广。文献[16]是基于云神经网络的故障诊断模型,引入改进的自适应遗传算法,保证了故障诊断的精度和效率,但是该文主要对算法进行改进,文中数据靠神经网络进行模拟训练,数据的可信度难以得到保证,装备出厂时会有相应的FMECA 信息。本研究则是根据FMECA 信息和系统结构框图建立装备的测试-故障诊断一体化模型,根据测试性模型对系统进行测试性设计,根据FPN 对子系统进行故障诊断,该模型不仅能够处理复杂的故障传播过程,还可以根据推理算法将该过程定量转化为数学模型,对故障进行精确定位以及故障预测。
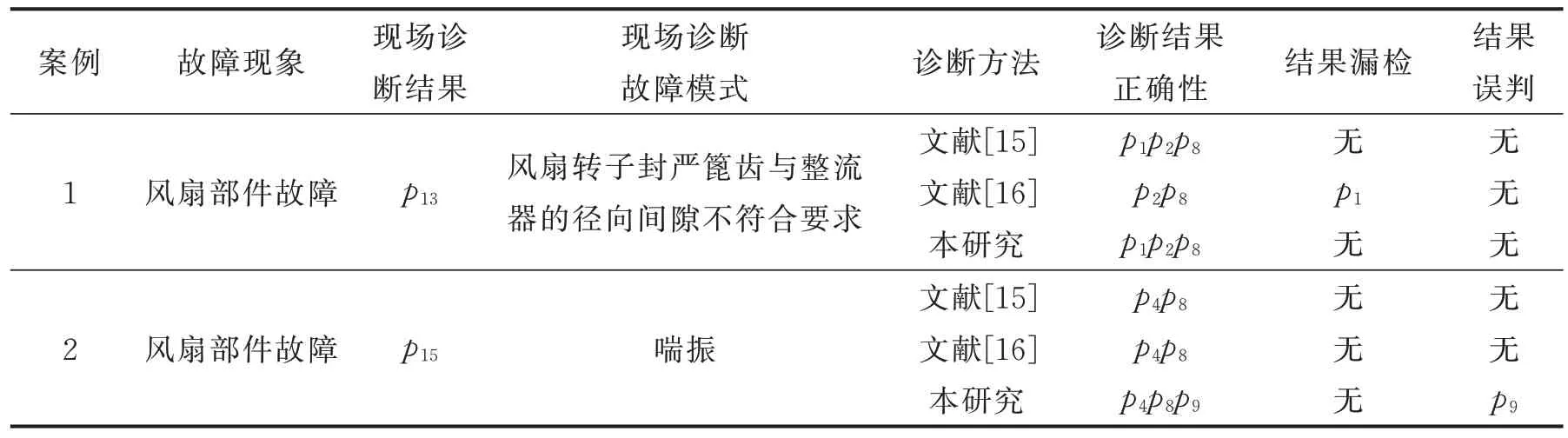
表7 与其他方法诊断结果的比较Tab.7 Diagnostic results compared with different models
1)提出基于Petri 网的测试-故障诊断一体化模型,该模型同时兼备测试性设计和故障诊断等功能。
2)对FPN 的定义和元素的组成进行了详细的论述,采用神经网络对权值等参数进行优化调整,弥补了参数依赖专家经验以及不准确的问题。FPN经过神经网络学习训练变成NFPN。
3)以风扇部件为例,建立其系统级测试性模型和子系统的NFPN 模型。根据相关性矩阵得到测试性指标,指导BIT 设计。对子系统的NFPN 模型进行正、反推理,将故障传播过程定量转化为数学方程,对故障进行精确定位,避免了故障检测的盲目性和复杂性。
4)通过故障树和实际故障数据对推理算法进行验证,证明了本研究模型和算法的有效性。
猜你喜欢 置信度权值变迁 基于数据置信度衰减的多传感器区间估计融合方法电子技术与软件工程(2022年15期)2022-11-11一种融合时间权值和用户行为序列的电影推荐模型成都信息工程大学学报(2022年3期)2022-07-21一种基于定位置信度预测的二阶段目标检测方法小型微型计算机系统(2022年4期)2022-05-09小渔村的变迁快乐语文(2021年27期)2021-11-24基于5G MR实现Massive MIMO权值智能寻优的技术方案研究邮电设计技术(2021年2期)2021-03-13回乡之旅:讲述世界各地唐人街的变迁汉语世界(The World of Chinese)(2019年1期)2019-03-18正负关联规则两级置信度阈值设置方法计算机应用(2018年5期)2018-07-25强规划的最小期望权值求解算法∗计算机与数字工程(2018年5期)2018-05-29一纸婚书见变迁海峡姐妹(2018年5期)2018-05-14程序属性的检测与程序属性的分类计算机测量与控制(2018年3期)2018-03-27