王政松
中铁二十三局集团,四川 成都 610072
隧道照明技术在我国的发展时间并不长,理论体系未创建完成,实践经验较匮乏。21 世纪之前,我国在公路隧道设计方面只是以《公路隧道设计规范》(JTJ 026—1990)标准为参照。进入21 世纪之后,推出了《公路隧道通风照明设计规范》(JTJ 026.1—1999)、《公路隧道照明设计细则》(JTG/T D70/2-01—2014)等标准。这些标准既是对工程实践经验的汇总[1],也是对最新科研成果的充分体现。标准内容借鉴了新的研究成果,借鉴了国外隧道照明的成功技术经验,为我国公路隧道照明节能技术的发展指明了方向。在中国,自动控制在大隧道项目建设中发挥出重要作用,包括厦门海沧隧道、南山隧道等,虽然这种照明控制系统不能动态化采集照明设备运行中的数据信息,无法实现智能化控制,但并不影响隧道照明智能节能发展潜能的不断挖掘[2]。
隧道节能技术虽有重大突破,但仍存在不少问题,如日光光纤光束采集技术稳定性不强,当前只是停留在施工阶段,不具备投入实践的条件。我国虽然已经着手开展太阳能光伏发电试验,但要降低成本并确保在合理的距离内普及,仍有许多工作要做;
无LED 电平调制的智能光控制技术尚未得到研究和实践验证。此外,科研人才存在较大缺口,基础研究成果不够丰富,建筑改造效果不佳等。这些都不利于隧道节能技术在我国的发展[3]。
基于此,为了提高隧道照明节能效果,文章一种隧道照明主控制器的设计方法,避免因隧道照明主控制器设计的不合理而造成能源的过度浪费,亦可节约隧道运营成本。
1.1 LED 隧道照明
2008—2010 年,LED 隧道照明发展较快;
2011—2013 年,进行了深入集成。2009 年,LED 白光的光效可达到100 lm/W,LED 无级调光技术被引入多个关键项目中,包括安徽前山隧道、广东山隧道等,这些项目已经实施了工程论证,凭借着优异成绩征服了项目管理者[4]。
通过相关数据了解到,把LED 灯具无级调制运用于车载参数、亮度、速度等方面,能以最低的能源获得更高的效率[5]。经对比发现,以车流量和车速为控制参数,对洞内LED 灯具进行无级调光可实现最大节能效率,相比基于洞外亮度的分级控制方法可节能36.6%。
1.2 太阳能照明系统
2008 年,北京奥林匹克中心地下车库安装了19 根太阳能灯管。这是首次尝试在地下空间运用太阳能照明系统,并取得了良好成效。3 年之后,陕西科技大学成立了课题研究小组,经过不懈努力推出了PV-LED直接照明系统,研发的太阳能输送带也引起了业内关注,为高速燕山隧道项目建设提供了技术支撑。河北承德市、汉国市、凉东小隧道先后投入使用全国最大的隧道太阳能光电照明系统,吉林省建成的汽车隧道运用了太阳能智能LED 系统,开创了国内先河。长安大学的研究者们运用先进技术对太阳能与风能进行弥补,在中短途隧道中以LED 复合体的形式为照明提供电力。
2.1 人工控制模式
人工控制向管理层提出了较高要求,要对天气条件、交通量、车速等进行控制。一般而言,可以采用单回路与多回路两种方式实施管理。人工控制需要投入较多的人力资源,控制流程烦琐、需要考虑的内容较多,即使考虑得较为周全,也无法满足当代交通发展所需,造成了资源浪费。实现节能的简单电路会给道路安全带来隐患。因此,这种人工控制模式逐渐淘汰,取而代之的是新型的控制模式。
2.2 自动控制模式
自动控制模式借助传感器等检测工具动态化采集数据,如隧道外部的交通、亮度信息等,采用电子控制设备在多样化的隧道照明电路中进行灵活选择,在不需要人工干预的前提下可以自动调光。虽然自动控制方法简单,但仅限用于原有的调光电路,不能在整个隧道照明系统中进行动态调光。
2.3 智能控制模式
可以把智能控制技术应用于自动控制,如雾控制、神经网络控制和专家系统。虽然智能控制仍在示范与探究阶段,却为隧道照明控制指明了下一阶段的发展方向[6]。伴随着大量技术成果的问世,其应用场景也会越来越多。
3.1 模糊控制原理
天气、车速、车流量等都会对隧道照明效果产生一定影响。要想发挥LED 无级调光的优越性,需要及时调整隧道内照明亮度。如果运用传统方法,要围绕隧道内照明亮度进行建模。由于环境参数复杂,而灯具也具有明显的随机性,隧道照明系统具有时变、非线性等特征,数学建模难度较高。模糊控制可以在不需要数学建模的前提下实施模糊化处理,由此解决了建模难题,为隧道照明控制算法研究带来了有效帮助。
3.2 隧道照明主控制器输入量函数
由于公路隧道照明的主要调光依据是入口段照明,参照入口段照明计算过渡段照明。故而,只需要分析隧道入口段照明控制方法。入口段照明会受诸多因素的影响,把车速、车流量、隧道外亮度确定为隧道照明主控制器输入量,与之相应的语言集分别为V、Q、L。
以2014 版《公路隧道照明设计细则》(JTG/T D70/2-01—2014)为准,与多名专家进行磋商,将L的真实论域与离散论域设定为[0,6 500]、[-4,-3,-2,-1,0,1,2,3,4]。洞外亮度隶属度函数如图1 所示。

图1 洞外亮度隶属度函数
在设计细则中,把Q设定为不同标准,分别为每小时180 辆、350 辆、650 辆、1 200 辆,真实论域与离散论域分别设定为[0,Qmax]、[-4,-3,-2,-1,0,1,2,3,4]。车流量隶属度函数如图2 所示。
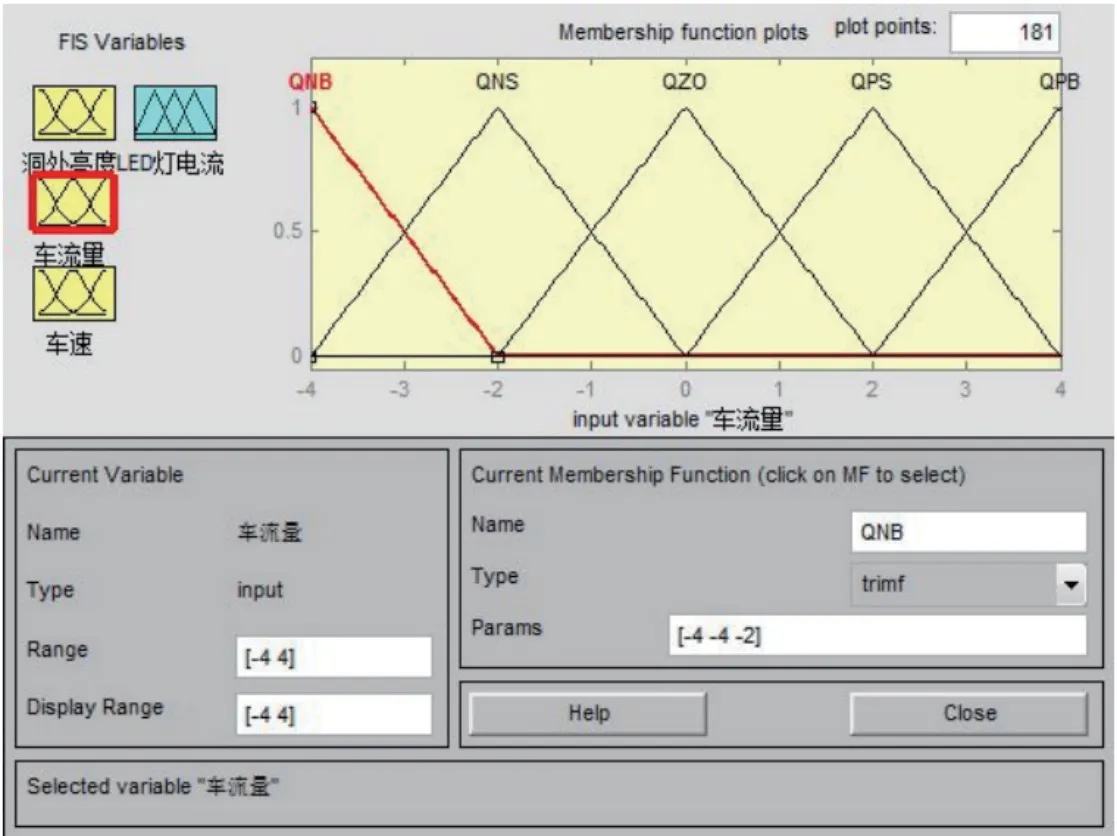
图2 车流量隶属度函数
设LED 灯具输出量电流的真实论域为[minI,maxI],取离散论域[-4,-3,-2,-1,0,1,2,3,4]。该变量模糊化如表1 所示。输出LED 灯具电流隶属度函数如图3所示。

图3 输出LED 灯具电流隶属度函数
4.1 隧道照明主控制器硬件组成
智能隧道照明控制器主要包括接口、主控模块等,系统结构框图如图4 所示。
4.2 输入量采集设备选择
车速、车流量、隧道外亮度设定为公路隧道照明主控制器输入量,通过线圈车辆检测器与隧道洞外亮度检测器采集数据。线圈车辆检测器的环形绕组埋在道路下方。通过检测车辆在绕组磁场中的干扰,可以精准计算获得速度与车流量信息。这种方法成本低廉、易于掌握、技术成熟。车辆检测器选用中央信息技术控制有限公司设计的车辆检测器。
4.3 数据远程传输设备选择
在无线传输下,由主控制器将隧道照明状态数据传输到远程监控中心,由此实现实时化监控和及时显示。选择无线通信模块data-6121,这一模块可以通过手机与短信传输远程数据,且功耗较低。
智能隧道照明控制器软件设计流程如图5 所示。首先对所有模块进行初始化处理,然后读取隧道外的亮度和交通信息。当系统处于非人工操作状态时,系统将检查隧道条件是否正常。如果出现异常,需要及时发出警报,指明出现错误的程序,中止总线通信。当故障排除、隧道条件恢复正常之后,系统自动对总线通信进行检测。如果处于正常状态下,主智能控制程序将被启动,把无级调光命令发送给所有子控制程序,在第一时间向上位监控计算机发送调光管理状态信息。调控控制结束后,系统按预设时间延迟并再次开始上述循环。

图5 软件程序流程图
文章以隧道照明设计需求为导向,先分析隧道照明节控制类型,以天气、车速、车流量为输入数据,如选择相关的采集设备,然后为系统选择远程数据传输设备,可以起到远程监控的良好作用。文章为隧道照明系统设计主控制器,并对硬件与软件进行了设计。该主控制器可以依据输入数据完成调光控制,具有良好的节能效果,有一定的推广价值。
猜你喜欢 论域调光车流量 河惠莞高速隧道智能调光照明节能系统升级改造方案探讨中国交通信息化(2022年8期)2022-10-28基于Simulink变论域算法仿真技术研究计算机仿真(2022年2期)2022-03-15着舰指挥官非对称变论域模糊引导技术哈尔滨工程大学学报(2021年7期)2021-07-13基于变论域模糊控制的Taylor逼近型内模PID算法成都信息工程大学学报(2021年6期)2021-02-12双论域上基于加权粒度的多粒度粗糙集*计算机与数字工程(2019年8期)2019-09-03基于单片机的大棚自动调光设计电子制作(2017年17期)2017-12-18浅析LED灯具新型智能调光技术演艺科技(2015年1期)2015-07-21参考答案数学教学通讯·初中版(2015年5期)2015-06-17舞台调光的数字化趋势艺海(2006年2期)2006-07-24