赵超杰 邓涵月
(1.中交第一公路勘察设计研究院有限公司 陕西 西安 710065)
随着我国公路里程的持续增加,我国公路网络已基本形成,公路交通的强大优势有力地推动了社会、经济的发展。但是随之而来的交通安全已经成为我国公路交通必须面对的重大问题。因为我国人口基数大,车辆保有率高,近些年,我国每年发生的道路交通事故数、死亡人数、万车死亡率、直接经济损失等指标一直居世界前列,如何有效降低交通事故仍然是交通安全研究领域亟待解决的问题。
对大量的交通事故分析表明,80%以上的车祸是由于驾驶员反应不及时引起的,超过65%的车辆相撞属于追尾相撞。研究表明,如果驾驶员能够提早1s意识到危险并及时采取预防措施,则有大约60%的正面碰撞事故和90%的追尾事故可以避免[1]。为了让驾驶员在事故发生前提早感知风险,国内外学者对车辆防撞预警方法及模型进行了大量研究。随着北斗导航卫星的发射与组网,基于卫星定位技术的研究越来越多。张乐然等应用卫星定位技术与无线通信技术实现车车间的车距预警[2,3];
王楠等利用卫星定位技术实现对道路车辆的管理与诱导[4,5]。
吴明先等采用了基于高精度GNSS组合定位技术,通过对车辆未来1s、2s、3s轮廓与周围车辆及设施的位置状态,实现车辆运行的分级预警[6]。
车载终端作为数据采集设备,需要能实现厘米级高精度定位,且能实时上传车辆信息到预警平台,并接收预警平台下发的信息。但目前对车载终端的研究主要面向车辆监控、管理、调度以及服务等方面[7],“两客一危”车辆上的车载终端,其定位方式仍采用单点定位,精度较低,而且数据更新率低;
而测量型接收机可以满足高精度定位要求,但不能和服务平台通信,均无法满足车辆风险预警的要求。本文引入北斗高精度定位技术,提出并设计一种满足车辆运行风险预警系统的车载终端,并在真实高速工况下对车载终端进行测试,可为集成化设计车载终端提供参考。
基于北斗高精度定位的车辆运行风险预警系统工作原理如图1所示,系统由预警平台、车载终端、CORS服务站以及通信链路组成。
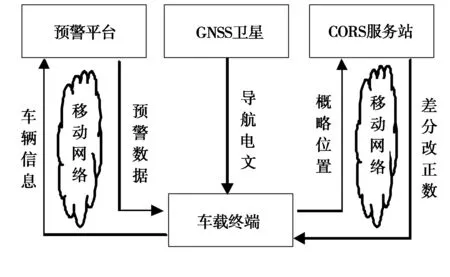
图1 风险预警系统工作原理
预警平台具有用户管理、车辆管理、设备管理、预警预报信息管理及其它管理功能,主要以WebGIS的方式展现,叠加高精度影像图与高精度地图,通过与车载终端的不断交互,可实时显示在途车辆运行轨迹。该平台还集成了车辆碰撞模型算法,可根据车载终端提供的高精度定位数据、车辆速度、方位等数据,预测车辆运行轨迹,用来判断其轮廓是否与其他邻近车辆以及中央分隔带、护栏等公路设施存在碰撞,并对碰撞进行分级,对有碰撞车辆下发相应等级的风险预警消息。
CORS服务站向用户提供高精度服务,由基准站网、数据处理中心、数据传输系统、定位导航数据播发系统四部分组成[8,9]。基准站网是由间距30Km以内、组成多边形的单基站组成,各基站通过数据传输系统将卫星星历与观测值汇集到数据处理中心,数据处理中心针对基站网内不同的流动站发送不同的差分改正数,相当于在流动站附近虚拟出一个基站,可大大缩短基线距离,提高定位精度[10]。
车载终端是一台安装在车辆上具有4G通信与语音报警功能的GNSS接收机。工作时,卫星天线接收GNSS卫星导航电文实现定位,当车载终端跟CORS服务站建立连接后,可以接收来自CORS服务站的差分改正数,从而提高定位精度,实现厘米级实时定位。车载终端还是预警系统的数据采集设备,为预警平台实时提供车辆的位置、速度、航向角等预警算法所需信息,车载终端也可以接收预警平台下发的风险等级信息,并做出语音报警,提醒驾驶员谨慎驾驶,提高行车安全。
车载终端是风险预警系统的位置传感器,由GNSS定位模块、4G通信模块、预警模块、异步通信模块、ARM主控单元、电源模块以及输入输出单元(OLED显示、矩阵键盘)组成,设备框图如图2所示。
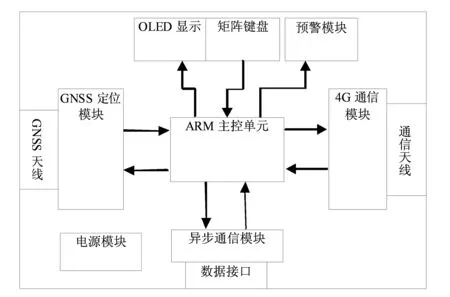
图2 车载终端设计框图
2.1 模块选型及设计
GNSS定位模块使用和芯星通的UB4B0M模块,是一款全系统多频高精度RTK定位模块,可以提供厘米级载波相位观测值和RTK定位精度。
4G通信模块采用有人物联网技术的USR-LTE-7S4模块,该模块是一款串口转4G的网络透明传输模块,支持域名解析服务,支持套接字分发协议等。适用于移动、联通、电信4G和移动、联通3G和2G网络制式(五模十二频),支持2路Socket连接。
预警响应模块是由一个语音合成(TTS)芯片与喇叭组成,语音合成芯片采用北京宇音天下的SYN6288芯片,通过异步串行通信方式,接收待合成的文本数据,实现文本到语音的转换。
主控单元是控制、协调车载终端正常运行的核心部分,采用ARM架构的32位单片机STM32F103RC作为主控芯片,实现车载终端与CORS服务站的互联,实时提取车辆的位置、速度等数据,控制4G通信模块发送车辆信息,控制预警响应模块执行响应等。
车载终端采集的是卫星天线中心点的位置,而系统的预测算法是判断车辆轮廓与其它车辆或护栏等设施的冲突,因此,预警平台要根据天线位置来构建出车辆的轮廓,这要求车载终端在上报位置以前,先把车辆的尺寸、天线相对车辆前方与左方的尺寸上报给平台。但是,车载终端是安装在不同车型上,同一车型也不一定在同一位置,因此车载终端设计了输入输出单元。
输入输出单元由1.54寸OLED显示屏与3*4矩阵键盘组成,显示屏在配置时显示配置的项目,在正常工作时,显示车辆的实时经纬度、速度、航向角、定位解状态等信息,矩阵键盘可输入数字及移动光标。
2.2 数据通讯协议
车载终端跟预警平台通信的协议参照《道路运输车辆卫星定位系统北斗兼容车载终端通讯协议技术规范》[11]中的数据格式,包括注册、位置信息汇报、应答等。为满足高精度定位与快速预警的需要,本设计进行了以下三方面改进。
第一,经纬度值由保留10-6度修改为10-7度。规范中位置信息汇报的数据格式如表1所示。
假设地球是一个半径r为6370km的标准球体,则10-6度的经线长度l为:

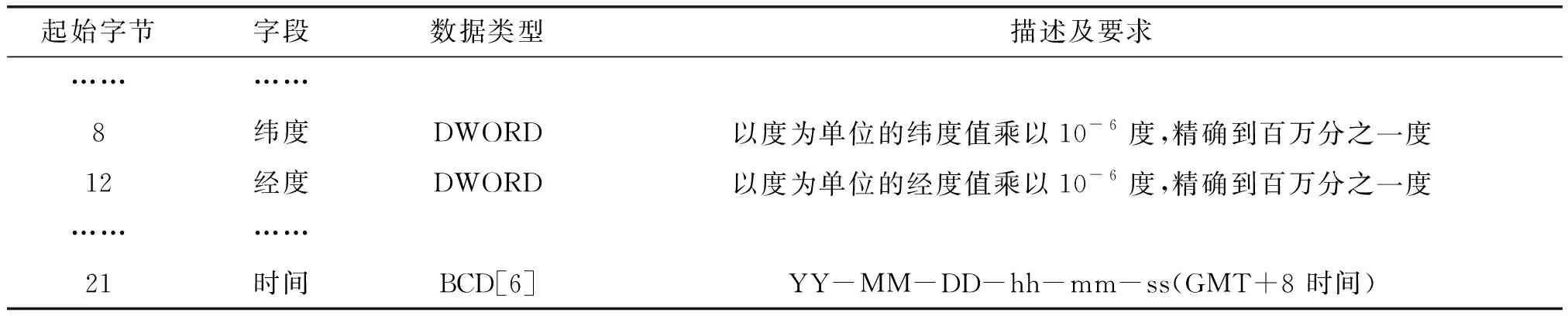
表1 位置基本信息数据格式
因为规范中的车载终端定位方式采用单点定位,其精度只能达到米级,所以将经纬度保留10-6度可以满足定位需求,而基于RTK技术的接收机经度可达厘米级,因此有必要将经纬度值保留至10-7度,且DWORD数据类型的4个字节完全可以保存180×107= 0x6B49D200的值,这样既不用增加内存开销,又能提高输出数据的精度。
第二,增加经线纬线方向。当经纬度值乘以107后,内存中的最高位始终没有使用,因此协议将最高位用来指示经线、纬线的方向,即MSB为0时,代表数值为东经或北纬;
MSB为1时,代表数值为西经或南纬。如:0x40C3E13F表示东经108.6579007度,0xC0C3E13F表示西经108.6579007度。
第三,时间数据格式增加十分之一秒字节。规范中时间信息只精确到秒,但在预测系统中,车载终端的位置更新率为5Hz,即每0.2秒输出一个位置信息。因为冲突预测算法是根据已知的连续9点来预测未来1-3秒的位置,因此时间的数据类型改为BCD[7],增加十分之一秒的一个字节,即使数据有粘包,也可以将数据按时间顺序排列出来。
2.3 数据分发协议
车载终端要求同时与预警平台、CORS服务站通信。因此,需要用两个Socket通道来封装不同服务器的数据,USR- LTE-7S4通信模块支持2路Socket连接,2路Socket的数据要通过同一UART接口收发。因此,需要一套协议来定义数据,协议格式如表2。根据该协议参数区的内容,判断数据发往哪个Socket,或来自哪个Socket。

表2 数据分发协议格式
2.4 NTRIP协议
车载终端访问CORS系统时,一般要用到NTRIP(Networked Transport of RTCM via Internet Protocol)网络通信协议。使用NTRIP通讯协议的CORS系统,其组成结构如图3所示。
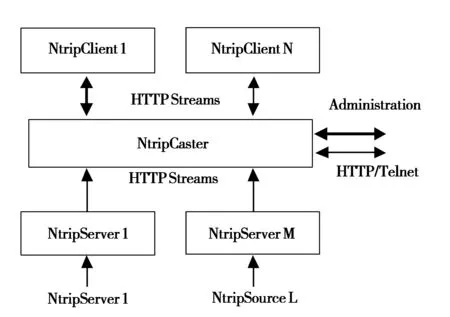
图3 NTRIP结构图
图3中NtripCaster是差分数据中心,负责接收、发送GNSS的差分数据,NtripServer负责把NtripSource产生的GNSS差分数据提交给NtripCaster,NtripClient登录NtripCaster后,就可以接收NtripCaster发送的差分数据。NtripCaster给NtripClient发送差分数据时有两种方案:一是直接转发NtripSource产生的差分数据;
二是通过解算多个NtripSource的差分数据,为NtripClient产生一个虚拟的基准站。
NtripClient一般就是GNSS流动站,登录NtripCaster后,发送自身的坐标给NtripCaster,NtripCaster选择或产生差分数据,然后发送给NtripClient,这样流动站即可实现高精度的差分定位。
车载终端研发完成后,其定位精度已在文献[6]中做过介绍,本文对车载终端的改进方案进行测试。自从北斗三号卫星导航系统组网成功以后,车载终端的搜星能力大大增强,在我国四系统导航设备可以同时捕获到40颗左右的卫星,从而实现快速定位。因此为了车载终端使用安装方便,在设计时考虑将设备跟卫星天线集成在一起,做成一体机形式,只引出一条电源线即可。工作时只要将设备放置在车辆前挡风玻璃下就可以实现高精度定位。
3.1 数据采集
为了验证卫星天线安装在车外与集成在设备内两种情况下定位的差异性,在西安绕城高速进行了测试,试验采用对比法,同时采集天线在车外与车内的数据进行分析比对。采集方案如下:
1、临时架设差分基站,基站采用NTRIP协议将差分信号通过4G网络发送到服务器,服务器再转发给流动站,基线距离小于10Km。
2、取两台车载终端,配置使其输出GGA、VTG数据,设置定位更新率为5Hz,增加样本数据,配置其NTRIP协议参数,使其能接收差分基站的差分改正信号。
3、取一台车载终端接测量型蘑菇头天线(HJC-GPS6388),将天线安装在车顶,作为对比测试的基准;
另一台接北天BN-345AJ型天线,先安装在车顶,采集完第一组数据后再将其安装在车内前挡风玻璃下采集第二组数据,天线用胶固定,避免滑动。
4、将两台车载终端用数据线跟电脑连接,打开串口助手,接受并实时保存数据。测试车从西安丈八收费站上高速,从阿房宫收费站下高速,完成第一组数据采集;
测试车又从阿房宫收费站上高速返回到丈八收费站,完成第二组数据采集。
5、数据整理分析。
将采集的数据分析整理,取出处于公共空间的两组数据。取数据时要保证每组数据中两台设备的开始时间和结束时间相同,将这些数据展示到图新地球上,轨迹如图4所示。将轨迹图放大,可以展现出两个天线的相对位置,如图5所示,图中黑色标记代表车外的HJC-GPS6388天线,白色标记代表车外的BN-345AJ天线,灰色标记代表车内的BN-345AJ天线。
图4 图测试车轨迹图
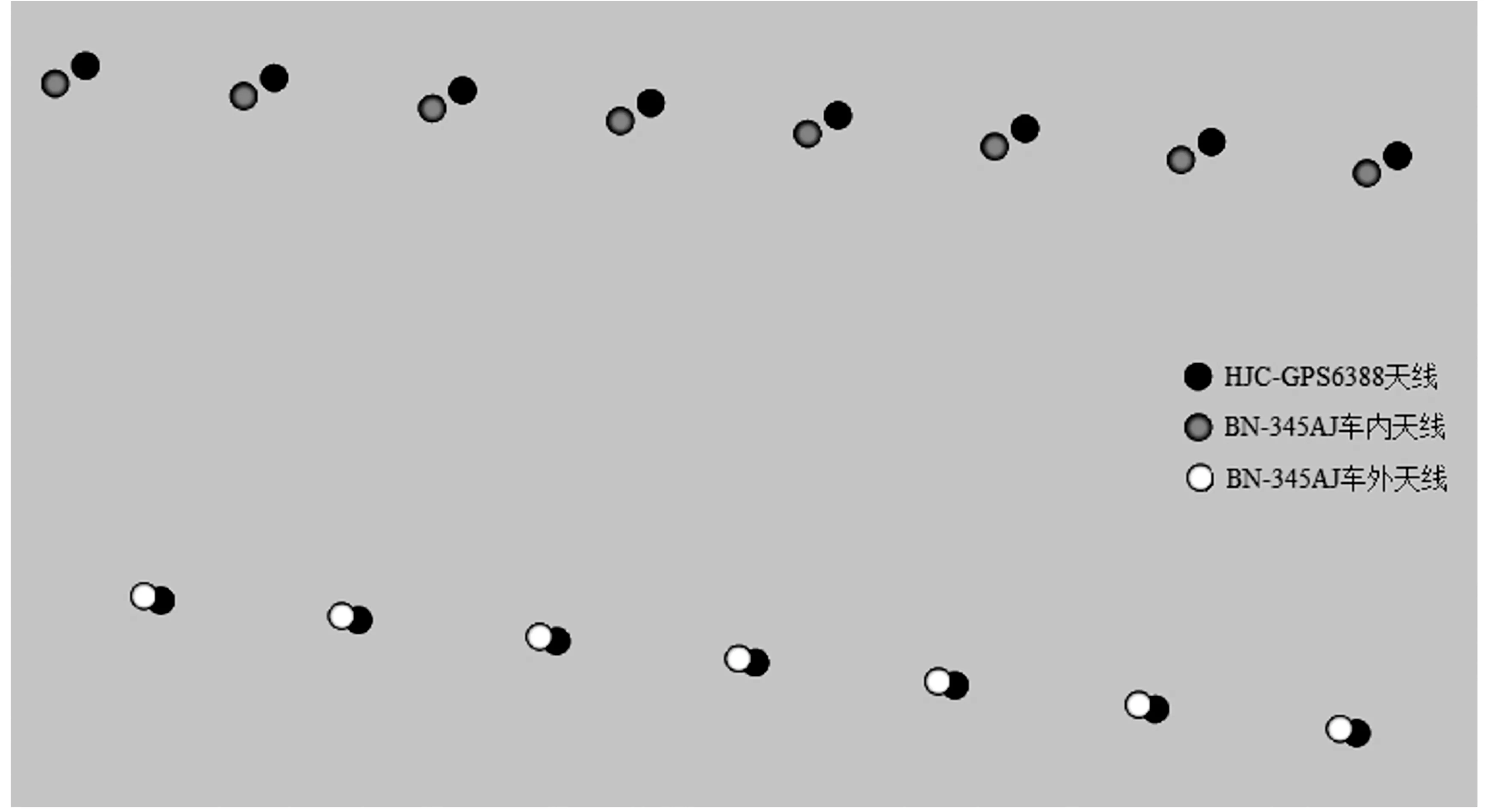
图5 图天线相对位置图
3.2 数据分析
车载终端的高精度定位值应为RTK固定解数据,而非单点定位、RTD和RTK浮点解数据(其精度无法保障),因此RTK固定解比例成为一项关键指标。在相同的测试条件下,如果RTK固定解比例越高,GNSS产品就越容易实现和维持RTK固定解,即可用性越好[12]。本次分析重点对RTK固定解比例进行比对,实验中RTK解状态比例对比数据如表3所示。表中0表示定位无效,1表示单点定位,2表示RTD 伪距差分,4表示RTK 固定解,5表示RTK 浮点解。

表3 RTK解状态比例对比
此次对比实验在同一路段往返采集数据,第一组数据两天线都在车外,主要变量是天线不同。由表3可以看出这组实验RTK解状态的各个占比基本相同,说明这两种天线在相同的测试条件下,搜星定位能力基本相同,两台车载终端性能基本一致。
通过对比第一组与第二组车外HJC-GPS6388采集的数据可以看出,两组数据中每种解状态的分布占比基本相同(第二组RTK浮点解略高一些),说明车辆往返的这个路段的周围环境对车载终端定位影响基本一样。
因此采集第二组数据时,将BN-345AJ天线置于车内,可以认为主要变量是天线的位置,即车内与车外。通过对比第二组数据可以看出,天线置于车内,解状态为4(固定解)的比例降低了近4%,而其它状态的比例都有所增加,也就是说天线置于车内对接收机定位有一定的影响。但是,88%的固定解比例,可以满足风险预警系统的要求。
RTK固定解比例既与测试车行驶的路线环境有关,如道路两侧的高楼、大树、输电线,过街天桥、隧道等;
也与通信网络质量有关,如通信中断,差分数据不能发送到车载终端,影响定位解算;
还与基站的距离有关。第二组数据的解状态随时间的分布如图6所示,从图中可以看出两种天线位置(车内、车外)的数据有着相同的变化规律,即车辆在行驶过程中遇到相同的影响因素,而在没有影响的地方,解状态都能保持稳定的固定解。
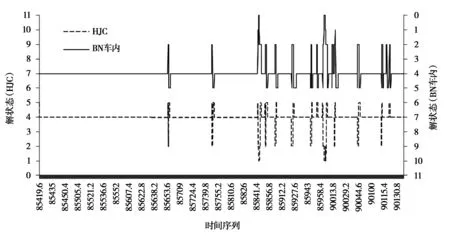
图6 图不同天线位置的解状态分布图
图7为车内天线解状态与卫星数的关系,可以看出车内天线的数据在保持固定解时,基本可以捕获到35颗以上的卫星,保证高精度定位。同时当解状态每发生一次跳变,此刻的卫星数就会急剧减少。图8是车辆驶过立交桥下的轨迹,从图8中可以看出,车辆驶过立交桥下后,轨迹有明显的间断或偏离,反应出遮挡对解状态的明显影响。通过图新地球的卫星图层可以看到测试区域有15座人行天桥或上跨公路,正好对应着统计图7中解状态的15个跳变。
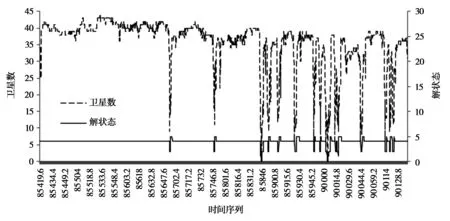
图7 图车内天线的解状态与卫星数关系
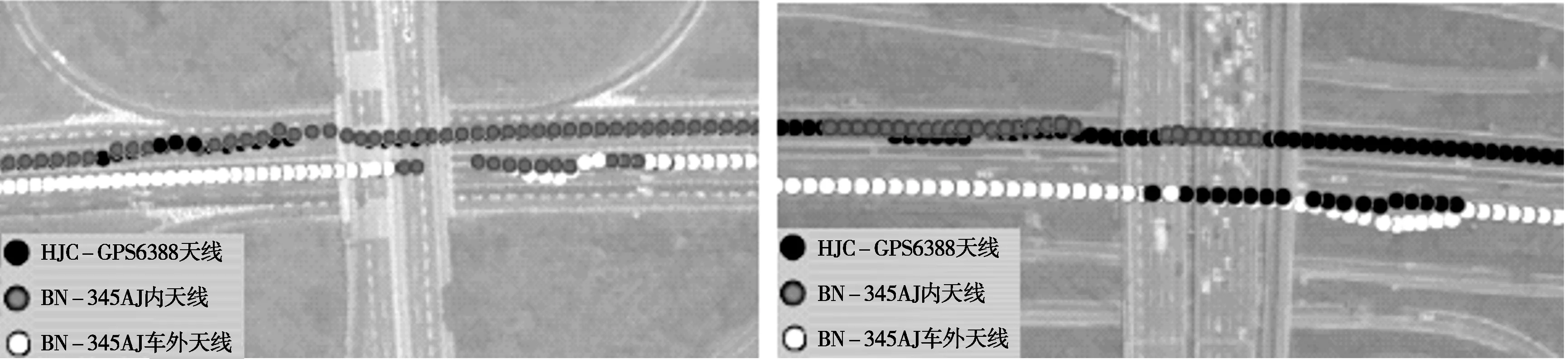
图8 图车辆驶过立交桥时的定位状态
本研究设计了一种改进的车载终端系统,将GNSS接收机天线集成到终端中,实现车内安装。通过对数据通信协议的修改,实现了高精度和快速定位与预警服务。两组实验数据表明,在相同环境下,两种天线的性能基本相同,均能满足车辆运行风险预警需要;
在无遮挡路段,天线置于车内或车外对解的状态影响不明显;
有短时遮挡时,天线置于车内或车外,都会影响接收的卫星数,从而影响RTK固定解占比,只是天线在车内时,定位解状态收敛到固定解的时间会长一点。因此将天线跟接收机集成在一起,置于车内,大部分情况可以达到天线置于车外的效果。
另外,在应用时要注意车前挡风玻璃不能贴防晒膜,不适用于大客车、大货车等前挡风玻璃竖直安装的车型,因为在这两种工况下,设备无法实现车内差分定位,甚至不能定位。
猜你喜欢 高精度差分车载 RLW-KdV方程的紧致有限差分格式数学杂志(2022年5期)2022-12-02符合差分隐私的流数据统计直方图发布湘潭大学自然科学学报(2022年2期)2022-07-28一种车载可折叠宿营住房汽车实用技术(2022年10期)2022-06-09关于高精度磁测在构造解释方面的应用分析科学家(2022年3期)2022-04-11数列与差分新世纪智能(数学备考)(2021年5期)2021-07-28奔驰S级48V车载电气系统(下)汽车维修与保养(2019年3期)2019-06-19基于Niosll高精度超声波流量计的研究电子制作(2018年17期)2018-09-28高精度PWM式DAC开发与设计智富时代(2018年8期)2018-09-28高精度PWM式DAC开发与设计智富时代(2018年8期)2018-09-28高抗扰高精度无人机着舰纵向飞行控制北京航空航天大学学报(2017年9期)2017-12-18