曹 粟,喻煌超,吴立珍,余 立,高家隆,陆俊麒
(国防科技大学智能科学学院,长沙 410073)
无人机(Unmanned Aerial Vehicle,UAV)具备灵活、低成本和安全可靠的特点,已广泛应用于农业植保、灾后勘探、交通监管等诸多场景,对其开展概念设计、结构设计、建模与控制等方面的研究具有十分重要的意义[1-5]。其中,垂直起降无人机(Vertical takeoff and landing,VTOL)在具备若干旋翼动力装置的同时,还拥有部分固定翼气动布局。当前应用较为广泛的主要有倾转旋翼无人机(图1)、尾坐式无人机[6-7](图2)以及复合翼无人机[8](图3)等。由于兼具旋翼无人机的部署灵活和固定翼无人机的长航时、高航速的特点,垂直起降无人机具有优秀的多任务适应能力,对其展开设计研究正逐渐成为解决现有无人装备瓶颈的有效手段之一。

图2 一种尾坐式垂直起降无人机[10]Fig.2 A VTOL tailsitter UAV[10]
倾转旋翼无人机的机翼上安装有一套可倾转的旋翼系统,通过改变倾转角度,完成旋翼模态起飞,到旋翼-固定翼混合模态(过渡模态),最后到达固定翼模态这一完整任务流程。和前者相比,尾坐式无人机利用机体自身的姿态倾转来代替倾转机构,在垂直起飞之后,逐渐将机身改平,进入传统的固定翼飞行模式。复合翼无人机(图3)则同时具备旋翼和固定翼无人机的气动布局和动力系统,完成旋翼模式起降和固定翼模式巡航的飞行任务。

图3 一种垂直起降四旋翼复合翼无人机[11]Fig.3 A quad-rotor fixed-wing hybrid unmanned aerial vehicle[11]
相较于倾转旋翼无人机和尾坐式无人机,复合翼无人机拥有控制方法成熟、结构简单的优点。然而,复合翼无人机的旋翼在巡航阶段无法产生前向动力,存在控制冗余过大的问题。因此,倾转旋翼无人机正逐渐成为垂直起降无人机的新型布局发展方向[12-16]。较早的倾转四旋翼无人机的布局尚未加入固定机翼,在舵机的驱动下,无人机的四个旋翼通过倾转获得更大的操纵性和飞行速度(图4)。然而,其所受重力均由旋翼在垂直方向的拉力抵消,存在倾转角度受限、航时短的不足。因此,引入固定翼提供额外升力,可以有效的解决该问题[17](图5)。但是,当前该布局的无人机多停留在理论设计阶段。同时,无人机在旋翼倾转过程中将不可避免的产生负迎角,此时机翼产生的负升力会极大的威胁飞行安全,如何避免负升力的产生,也是一个亟待解决的问题。

图4 一种小型倾转四旋翼无人机[12]Fig.4 A quadrotor UAV with tilting propellers[12]

图5 一种倾转四旋翼无人机布局设计[17]Fig.5 A layout design of a tilting quadrotor UAV[17]
针对上述问题,本文提出了一种新型的倾转四旋翼无人机设计方法:在传统的四旋翼无人机基础上,设计倾转机构,搭建倾转四旋翼无人机平台;
设计带有自适应机构的可折叠机翼,一方面有利于无人机在狭小空间的部署,另一方面自适应机构可以根据无人机当前的飞行迎角实时的调整机翼的倾转角度,从而避免机翼上负升力的产生。本文将基于上述研究方法研发小型原理样机,并系统地开展气动分析、建模与控制以及飞行试验研究。
2.1 无人机系统组成
无人机的系统组成与总体设计方案如图6所示,机载的各个主要部件如下。

图6 带可变形自适应机翼的倾转四旋翼无人机示意图Fig.6 Schematic diagram of a tilting quadrotor drone with deformable adaptive wings
2.1.1 旋翼及倾转机构
倾转机构由舵机、摇臂、拉杆和电机组成(图7)。舵机通过驱动连杆带动电机和螺旋桨倾斜。通过引入旋翼倾转这一自由度,无人机的飞行速度和机动性能得到了有效提升。

图7 旋翼倾转机构Fig.7 Schematic diagram of rotor tilting mechanism
2.1.1 自适应折叠机翼
无人机的自适应折叠机翼如图8所示。机翼在地面为折叠状态,在升空后展开并提供升力。位于机翼与机身连接部位的自适应机构可自适应的调整机翼的迎角,使得机翼保持正迎角飞行,从而提高飞行的稳定性。

图8 自适应机翼机构示意图Fig.8 Schematic diagram of adaptive wing mechanism
2.1.3 无人机机身平台
无人机平台设计为“工”字型连接机构(图8),可在承载自适应机翼、倾转四旋翼机构的同时,具备一定的抗风能力与抗毁能力。
2.2 飞行模态设计
无人机根据任务流程可分为4 个飞行模态(图9),具体如下。
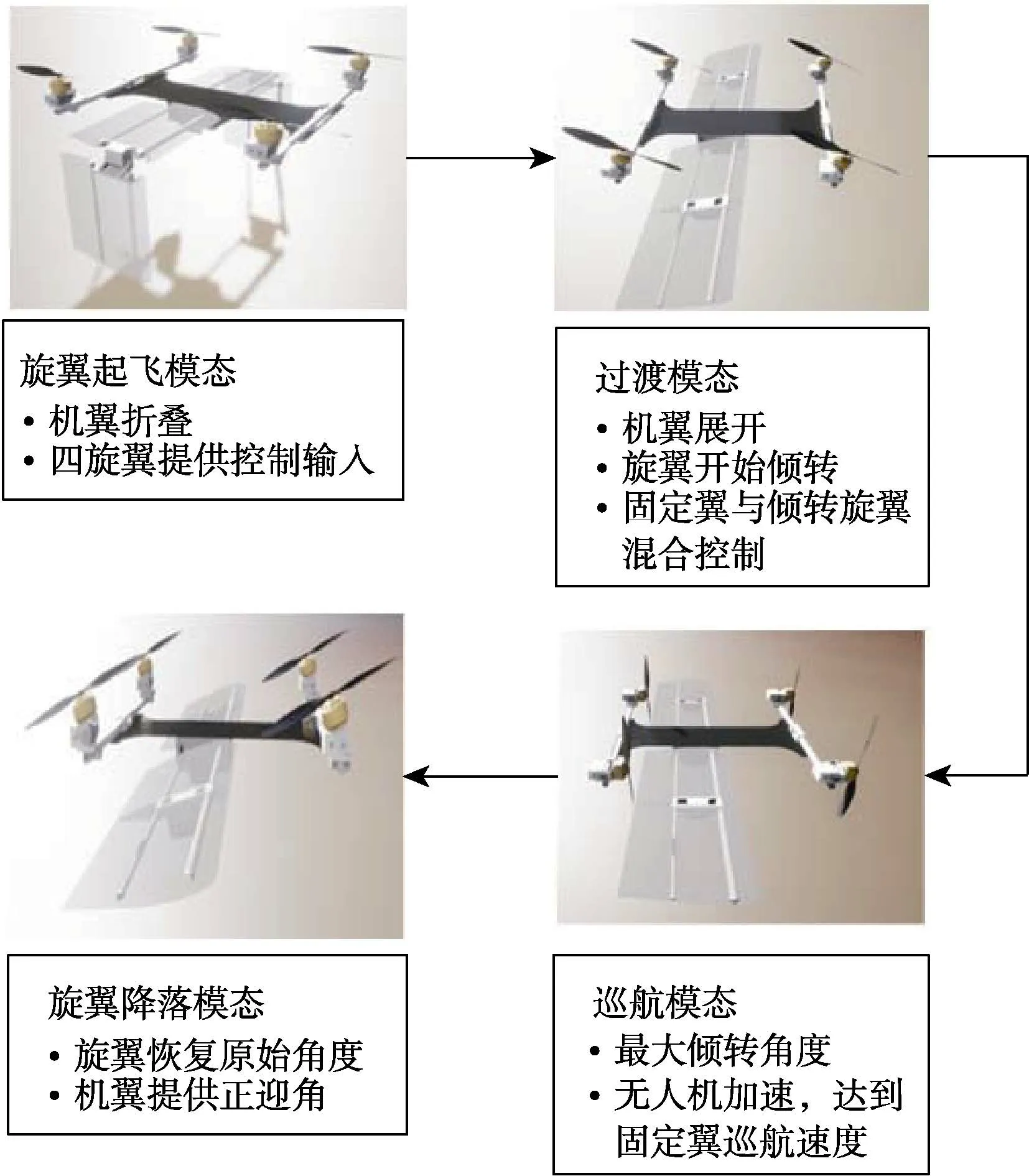
图9 各飞行模态示意图Fig.9 Schematic diagram of each flight mode
(1)旋翼起飞模态:无人机以旋翼模式垂直起飞,机翼保持为折叠状态,这一方面有利于增加上升阶段的稳定性,也可以确保无人机的临时着陆能力;
(2)过渡模态:无人机到达指定高度之后,机翼开始展开,4 个旋翼在舵机的驱动下开始缓慢向前倾转,无人机在X轴方向开始加速,此时机翼开始产生升力,无人机进入旋翼和固定翼复合控制模态;
(3)巡航模态:过渡模态执行完毕后,旋翼倾转到最大角度,此时旋翼产生的拉力在垂直方向的分量与机翼产生的升力之和等于无人机重力,无人机处于巡航飞行状态,旋翼拉力在X轴方向的分量则用于抵消无人机机翼产生的诱导阻力与机身产生的阻力。无人机在X,Y和Z轴的控制力矩均由旋翼产生;
(4)旋翼降落模态:无人机在到达指定任务点之后,旋翼开始在舵机的作用下回复到初始角度,此时无人机在X轴方向的速度迅速减小,在无人机回复到旋翼模态时,机翼开始折叠,无人机逐渐下降并在指定任务点着陆。当前模态也可用于低空侦察等特殊场景。
3.1 无人机建模
本节将针对设计的无人机平台建立动力学模型。各坐标系定义如图10所示,包括惯性坐标系Og,xg,yg,zg,机体坐标系Ob,xb,yb,zb和旋翼坐标系Ow,xw,yw,zw等三个描述无人机及其部件运动的参考系。

图10 各坐标系示意图Fig.10 Schematic diagram of each coordinate system
基于牛顿-欧拉法,可建立无人机的动力学模型如下:

式中,F=[Fx,Fy,Fz]T和M=[Mx,My,Mz]T分别表示作用在机体重心的合力和合力矩,V=(u,v,w)T和ωB=(p,q,r)T分别为无人机的线速度和角速率,m和J=diag(J1,J2,J3)分别为无人机质量和惯性矩阵。
无人机受到的合力包含旋翼的拉力FRB、重力FGB以及机身受到的空气动力FAB。拉力在旋翼坐标系表示为:

式中,为第i个旋翼与机体之间的旋转矩阵,旋翼产生的拉力定义为:

式中,kf和Ωi分别为拉力系数与旋翼转速。
近似机翼产生的升力以及阻力为无人机整体所受升力与阻力。定义L和D分别代表升力和阻力,S为机翼参考面积,c为平均气动弦长,攻角为α,侧滑角为β,空速为Vα,升力与阻力可由如下简化模型计算得到:

升、阻力系数分别为:

式中,Ci0,Cαi和Ciq为相关气动导数。气动导数通过计算流体力学仿真方法获取,由于上述空气动力均在气流坐标系下计算,需转换到机体坐标系:

类似的,无人机所受力矩M主要包含气动力矩MAB,旋翼产生的拉力力矩MR和反扭力矩MR′,与倾转中的陀螺力矩MT,气动力矩计算方法与气动力类似,在此仅介绍陀螺力矩的计算方法,考虑无人机自身旋转角速率ωB,旋翼i产生的陀螺力矩为:

式中,ωi和ωservo分别为旋翼的旋转角速率和倾转角速率。
3.2 无人机控制器设计
控制系统具体则采用典型的串级反馈控制结构[18],无人机的位置控制处于外环,内环是姿态控制,姿态控制是位置控制的基础,充分利用位置控制与姿态控制之间的内在物理关系,通过改变机体姿态实现有效的位置控制。位置控制的计算方法为:

式中,kp,x,kp,y,kp,z,ki,x,ki,y,ki,z,kd,x,kd,y,kd,z为控制系数,xc,yc,zc为位置指令,ex,ey,ez分别为x,y,z方向的位置跟踪误差。
姿态控制的核心采用“倾转+机翼增升”控制方法,在机翼能够稳定增升的前提下,基于电机倾转以及传统的旋翼控制,进一步控制飞行器的俯仰角、滚转角和偏航角。

式中,eφ,eθ,eψ分别为滚转、俯仰和偏航方向的位置跟踪误差,φc,θc,ψc分别为滚转、俯仰和偏航方向指令。
飞行器的姿态及位置主要依靠4 个旋翼以及4 个伺服舵机控制,而姿态的虚拟控制量是R、P、Y、T,需要通过控制分配将虚拟控制量转化为实际执行控制输出。加速前飞过程中,在俯仰的基础上4 个旋翼同步前倾产生前向拉力,此时控制分配方程需要做出相应的调整,倾转角度根据加速指令得到,范围为0°~30°。基于前文的受力分析可得到控制分配方程:

式中,R,P,Y,T为虚拟控制量,kf,kd,ri,x,ri,y为拉力相关系数和轴距,αi为第i个电机的倾转角度。
无人机各旋翼的转速指令可通过求解控制分配矩阵得到:

无人机整体控制框架如图11所示。其中内环由姿态控制器与角速度控制器组成,三轴角速率由飞控内部集成陀螺仪采集并反馈,姿态角经角速率积分得到。外环包括位置控制器和速度控制器,飞行器三轴速度通过加速度计采集并积分得到,位置信息由机载定位装置提供。通过机载传感系统感知当前的飞行状态,由内外环组成的控制系统进行解算得到虚拟控制量,经过混控器得到实际控制输出,实现飞机位置及姿态的反馈控制。

图11 倾转四旋翼无人机控制框图Fig.11 Control block diagram of tilting quadrotor UAV
旋翼的倾转角度则采用开环控制方法。首先通过地面测试得到控制指令与舵机倾转角度的关系式;
然后在实际飞行中,期望倾转角度直接换算为控制指令传输给舵机调节旋翼角度,角度误差在0.1°以内。
4.1 气动特性仿真和分析
为得到本文中无人机的气动系数,同时研究无人机的旋翼与机翼、机体之间的相互作用,基于Navier-Stokes 方程来计算不同倾转条件下的无人机的流场及气动性能。求解过程依托Fluent 平台,网格划分采用非结构网格,共计320 万个单元以及60 万个节点,边界层尺寸设置为0.001 以精确捕获边界层效应。
本文首先针对两个典型状态,即旋翼倾转角度分别为0°和90°开展仿真。自由来流的迎角为0°,速度设置为 15 m/s,旋翼翼尖的转速为6000 r/min。根据计算结果,机翼在上述两个情况分别产生了4.5 N 和11.5 N 的升力。
从图12可以看到,旋翼产生涡流与机翼之间相互作用。尖端产生的涡流以下洗的形式作用于机翼表面,在接近机翼前缘时,涡流的方向发生变化,也进一步影响机翼产生升力系数和阻力系数。因此,在旋翼起飞模态,采取折叠机翼的方法,可以有效减少旋翼对机翼产生的干扰。在固定翼模态,旋翼与机翼的相互作用将对无人机的气动性能产生显著影响,需要进一步研究在不同迎角条件下的无人机流场。
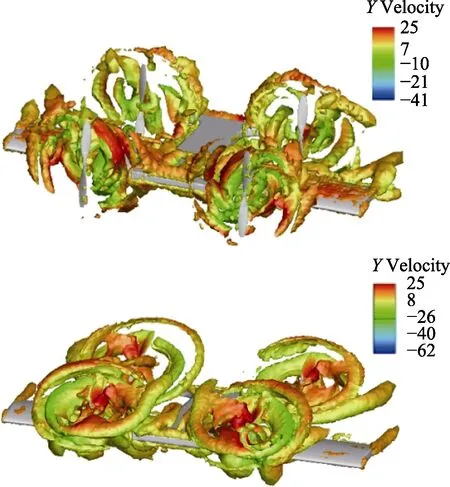
图12 0°迎角的旋翼模式与固定翼模式的流场仿真结果Fig.12 Simulation results of flow field in rotor mode and fixed wing mode at 0° angle of attack
图13为无人机在迎角为25°,旋翼倾转角度同样为25°时的流场仿真结果。此时机翼产生的升力增加到20 N,这意味着在巡航飞行过程中,无人机可以通过旋翼的倾转角度以及迎角的调整,持续地为稳态飞行提供配平拉力。

图13 25°迎角条件下25°倾转角度的流场仿真结果Fig.13 Simulation results of the flow field with a tilt angle of 25° under the condition of an angle of attack of 25°
综上所述,本文提出的倾转四旋翼和自适应机翼的设计方法可行。需针对不同倾转角和迎角的无人机模态开展更多的计算流体力学仿真,以收集足够的气动数据。这些数据可用于飞行控制器的设计,以确保无人机能够在可靠的飞行包线内飞行。
3.2 模型参数辨识
除了气动参数,无人机的旋翼相关参数也需要通过辨识方法进行拟合。本文通过测试平台记录旋翼的拉力、扭矩与转速,再基于最小二乘法拟合得到旋翼的拉力系数和反扭系数,进而为飞行任务提供支撑,如图14所示。

图14 旋翼拉力与反扭力矩参数辨识流程Fig.14 Identification process of rotor tension and anti-torque parameters
无人机的惯性矩阵则通过复摆法进行测量,构建固有频率ωn和周期Tn分别为:

式中,m,g分别为质量和重力加速度,l为无人机重心到复摆支点的距离,J0为无人机重心设置为复摆支点时的转动惯量。当测量得到摆动周期Tn时,利用平行轴定理,可以得到无人机绕其重心的转动惯量J1为:

通过测量在无人机三个平面内的转动惯量,即可得到无人机完整的惯性矩阵。
4.3 实物飞行验证
4.3.1 原理样机搭建
基于上述设计方法,开发了一架原理样机如图15所示。其主要由碳纤维机身、4 个电机(含螺旋桨)、4 个倾转机构以及自适应折叠机翼组成。具体布局如图15所示,为了保证机身的稳定,机身采用“工”字型内嵌碳管的连接结构。4 个倾转机构可以确保无人机相较于传统的四旋翼飞行器更加灵活、快速。此外,机身位置安装有自适应折叠机翼,一方面可以在飞行前后代替起落架支撑机体;
另一方面可以在飞行器上升到一定高度后展开,进一步提供升力。无人机的具体指标参数如表1所示。
图16展示了自适应机翼的地面测试结果。如图16(b)所示的飞行条件下,即无人机以旋翼模态前倾飞行时,固定角度的机翼将产生负升力。在考虑了自适应机构设计后,机翼能够根据当前机体的迎角调整倾转角度,可以保证无人机在前倾时,机翼仍能为机体提供升力,极大地提升了无人机的飞行性能。

图16 在两种不同的迎角情况下,无人机的自适应机翼倾转情况Fig.16 UAV’s adaptive wing tilt situation with two different angles of attack
4.3.2 飞行系统框架
为进一步开展倾转四旋翼无人机平台飞行验证,设计飞行系统架构如图17所示,机载计算机与飞行控制器组成无人机的核心计算部件,在接收地面站与遥控端输出的飞行指令的同时,将控制信号以可调宽度的脉冲波的形式传输给舵机,带动倾转旋翼与自适应机翼部件,以实现各个模态的飞行任务。机载计算机则可在飞行控制成熟后,在上位机系统中完成诸如图像处理、目标识别、任务规划等复杂任务。本系统选用基于Qt和C++开发的开源地面站软件QGroundControl作为地面站软件,从而实现自驾仪固件烧写、机型选择和配置、传感器校准、遥控校准、参数整定、实时数据曲线绘制、飞机状态显示、飞行路径规划等功能。

图17 无人机飞行框架示意图Fig.17 Schematic diagram of drone flight frame
4.3.3 飞行验证结果
无人机跟踪控制结果如图18所示。从图18中可知,无人机的速度和俯仰角均稳定收敛到期望值,验证了本文的控制方法的可行性。

图18 速度-时间与俯仰角-时间曲线Fig.18 Speed-time and pitch angle-time curves
无人机飞行的控制油门输出如图19所示,在0~10 s,无人机以旋翼模式起飞,在95 s 左右,无人机的旋翼开始倾转,进入过渡模态,机翼开始展开,最终进入固定翼模式飞行。

图19 飞行跟踪控制油门输出结果Fig.19 Flight tracking control throttle output result
飞行试验结果如图20~21 所示。无人机以旋翼模式起飞,该阶段可检测自适应机翼能否按预期展开以及倾转机构的可靠性。处于起飞状态时,无人机的机翼保持折叠状态,在到达起飞高度时开始展开,此时无人机位置保持不变。然后旋翼向前方进行倾转,进入过渡模态。进入机动状态后,无人机的水平速度快速增加,无人机保持平稳水平飞行。可以注意到,无人机在95 s 左右开始倾转时,此时无人机所受拉力方向快速绕y轴旋转。因此无人机在倾转的过程中,姿态由于拉力方向的改变而出现短暂的波动。为更好地阐明这一过程,将倾转开始后的5 s 内的姿态角(欧拉角)绘制如图20所示。
由图20可见,在倾转的过程中,由于倾转舵机安装角度以及倾转速度的差异,导致无人机出现航向角的较大波动(25°左右)。为稳定无人机的姿态,本文设计的控制器的控制输出产生突变,从而使得无人机的航向角稳定,由图20可以看到,无人机的航向角在3 s 后基本稳定。

图20 无人机倾转过程中姿态角-时间示意图Fig.20 Schematic diagram of attitude-time during tilting.

图21 无人机自主全任务流程Fig.21 Full mission process of the UAV
经过试验验证,无人机的模态控制满足预期要求,证明本文设计的无人机设计的合理性。对无人机的试验数据进行整理,其在不更换电源的情况下,飞行器最大航时可达25 min。最大飞行速度可达到36 m/s,高于同等机型的最快平飞速度(26 m/s),巡航速度也高达25 m/s,这充分凸显了该型无人机的优势。
本文介绍了一种带有自适应折叠机翼的新型倾转四旋翼无人机的设计方法。首先,描述了无人机的总体方案与结构设计,介绍了无人机旋翼起飞、过渡模态、巡航模态和旋翼降落4 个飞行模态。然后,基于牛顿-欧拉法和级联反馈控制方法,完成了无人机动力学建模和控制器设计。基于计算流体力学仿真,针对无人机的气动特性进行分析。同时,在地面开展参数辨识工作。最后,本文搭建了原理样机,通过飞行试验验证了该设计方法和控制算法的可行性。结果表明,自适应折叠机翼和倾转四旋翼设计可以有效提升无人机的最大飞行速度和航程。本文提出的设计方法可以为未来无人机设计提供新的思路。下一步工作包括无人机的优化设计和多模态智能控制等问题。
猜你喜欢 固定翼迎角升力 垂直起降固定翼无人机串联混电系统优化设计北京航空航天大学学报(2021年4期)2021-11-24连续变迎角试验数据自适应分段拟合滤波方法北京航空航天大学学报(2021年6期)2021-07-20民用飞机迎角传感器布局气动分析空气动力学学报(2019年2期)2019-05-08“小飞象”真的能靠耳朵飞起来么?科学Fans(2019年4期)2019-04-30一种新型固定翼无人机的研制电子制作(2019年7期)2019-04-25“大鹏”GW—20垂直起降固定翼无人机航空模型(2016年10期)2017-05-09“V”系列固定翼无人机航空模型(2016年10期)2017-05-09飞机增升装置的发展和展望中国科技纵横(2017年2期)2017-03-24关于机翼形状的发展历程及对飞机升力影响的探究分析中学课程辅导·教师教育(中)(2017年2期)2017-03-24你会做竹蜻蜓吗?少年科学(2014年7期)2014-08-18