冷红庆
(中铁工程设计咨询集团有限公司,北京 100055)
修建铁路初期最重要的是勘察地形,根据地形确定铁路的走向,勘察是修建铁路重要的基础[1],所以提高勘察的准确性、安全性和可靠性具有重要意义。在勘察时,对勘察地区用机载激光雷达(LiDAR)进行数据收集[2-3],机载LiDAR 是一项将激光测距、全球定位、惯性测量、频谱成像技术相结合的新型测量技术,它可以应用于飞机固定翼、直升机等多种航空飞行平台,实现对地表高度的准确测量和高分辨率图像的实时采集,从而实现条形地图和剖面地图的绘制。由于文蒙铁路地属滇东南岩溶山区,地形复杂,总体地势西北高、东南低,山峦连绵起伏,河谷、沟壑纵横交错等地形特征,采用人为测量的方式较为困难,且容易发生危险;
若采用无人机或遥感技术勘测,可能获取的数据并不准确,需要多项技术支持。因此根据前人经验,提出采用有人机机载LiDAR 航空摄影获取Li-DAR 数据点云的方法。
1.1 基于机载LiDAR 的新建铁路点云数据获取
1.1.1 航线设计
航线设计需符合《机载激光雷达数据获取技术规范》和《地形图航空摄影规范》,按照飞机的具体性能和飞机的实际性能,确定飞机的飞行高度和航拍区域。以新建文蒙线为航空摄影摄区,绝对航高为2 900 m,飞机型号和编号分别为R66 和B-70EL,搭载的LiDAR 航摄仪型号和航摄仪编号分别为Galaxy prime 及5060423,FOV(视场角)为55°,脉冲频率和扫描频率分为60 KHz 及60 Hz。
1.1.2 数据采集方案设置
新建铁路轨道测区数据的收集有飞行准备、飞行过程和着陆后3 个阶段。机载激光雷达测量前后,宜采用“∞”字型飞行方式进行IMU 初始化。同向连续航飞时间超过15 min 时,应重新进行IMU 初始化。固定翼飞机的转弯半径不小于5 km,直升机的转弯半径不小于1 km。在起飞前,必须保证航摄设备安装能正常使用,航摄设有充足的存储容量;
在启动激光雷达之后,需要等待有5 min,在此期间,利用惯性测量单元和卫星导航技术构成的POS 系统,用卫星进行锁定,改善数据的初始化。在进入测点之前,必须先在500 m 处做一个“∞”字形的航向,激活陀螺仪;
为了节约数据存储,在飞行、飞离测区和航向拐角的时候,都可以关掉激光数据记录器。在降落之后,要先让飞行器停下来5 min,然后才能关掉机载LiDAR。
1.2 新建铁路点云数据预处理
由于机载LiDAR 点云中包含了丰富的三维曲面数据,而这部分数据是由大量的点位数据反映出来,造成了点云数据存储量巨大,数据处理难度高,不能直接抽取测区铁路点云数据;
在LiDAR 点云数据中,对点云进行预处理,把点云滤波地表和非地表的点云进行分类,获得较高精度的地面高程模型,并根据高度差异的特征将非地表点云中的铁路点云进行分割[4]。点云的三维信号在进行预处理后仍然是庞杂、冗余的存储空间较大。在构造环境中,一般采用点云簇聚类来进行单一的环境要素的识别,从而造成了数据的稀疏性;
由于无结构性的环境要素是一个非常复杂和变化的过程,仅靠聚类识别的方法不能很好地描述整个铁路环境。为了解决这个问题,对IMU/GNSS原始观测数据应进行预处理[5],分离GNSS 观测数据、IMU 记录数据和eventmark 数据,并填写IMU/GNSS辅助航摄飞行数据检查结果分析表。在上述处理后,将IMU/GNSS 数据进行联合处理,解算出每张像片的6 号位方位元素,转换至成果坐标系,并填写手薄。采用差分GNSS 定位,IMU/GNSS 数据解算的平面、高程和速度偏差不应大于表1 的规定。

表1 IMU/GNSS 数据联合解算偏差限值
在符合表1 的规定后,对获取的机载LiDAR 进行检验:对检校场进行空中三角测量,计算偏心角及线元素偏移值。偏心角及线元素偏移值的解算中误差不应大于表2 的规定。
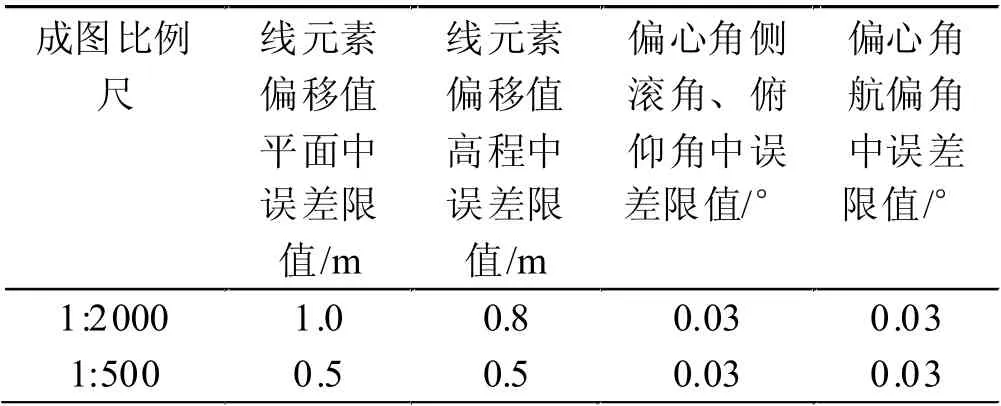
表2 偏心角及线元素偏移值中误差限值
根据上述过程,对比预处理后重建的点云数据和原点云数据的变化量,判定新建铁路点云数据预处理的计算速度,判断检验是否合格。检验结束实现新建铁路点云数据预处理,获取最佳新建铁路点云数据。
1.3 点云图像铁路区域提取
将新建铁路点云数据预处理结果,通过投影变换生成新建铁路的点云图像,采用面向对象提取技术,充分考虑新建铁路的纹理、形状、大小等空间属性特征,通过点云图像的分割以及分类,从中获取新建铁路区域,便于后续铁路勘察工作顺利开展。多比例尺的分割处理是以图像的区域融合为基础[6],由任意一块图像像素进行融合,直到生成图像区域。其主要思路是:先从一个像元出发,将其与相邻像元分开运算,以减少最后的异质性;
上述循环产生的物体是基础单位,然后依次和邻近物体分开进行运算,直到用户指定的尺度内无法进行对象的融合。图像区域异质性阈值用H 表示,光谱、形状异质性用Lcolor、Lshape表示,基于Lcolor、Lshape计算H,光谱和形状信息权重分别用wcolor及wshape表示,H 的计算公式为

在新建铁路图像中,每类地物都有自己的特点,通过在函数中加入这些特性,形成一个新的法则,就能精确地划分新建铁路图像[7]。针对轨道交通的特点,在进行划分时,首先要注意其空间特性,可以使用L/W的长度比率作为划分规则,Length 和Width 分别表示分割图像的长度及宽度,比率公式为

新建铁路周围的低矮植被,利用绿色植被指数Greenness 提取,G、R、B 分别表示航空影像的绿、红、蓝波段,Greenness 公式表示为

2.1 机载激光雷达设备系统、飞行器的选择
根据摄区的地形、时间等因素,选择R66 飞行执行飞行任务,飞机带有自动驾驶仪,能很好的控制飞行姿态,保障飞行质量。机载激光雷达设备系统选择自有设备GalaxyPrime 机载激光雷达系统,该设备扫描效率高并配备座驾,获取数据姿态稳定。
2.2 点云密度
机载激光雷达获取的点云密度为≥9 点/m2,设计FOV 为43°,脉冲频率为850 kHZ,扫描频率为77 HZ。
2.3 航摄时间及太阳高度角的选择
LIDAR 数据获取飞行时段不受太阳高度角限制,全天24 小时内均可飞行获取点云数据。机载激光雷达测量宜同时进行数字影像获取,航摄时间应根据摄区的太阳高度角和阴影倍数确定。
2.4 航摄分区
航摄分区划分参照GB/T6962-2005 和“国家基础航空摄影补充技术规定”中的相应规定执行,并且同时满足:航摄分区包含多个完整的加密分区;
航线敷设和划分分区时考虑每条航线直线飞行时间一般不大于15 min 的要求。考虑到繁忙空域和战斗飞行管制的要求,为此,航摄分区测段接边重叠应不少于200 m,且选择在平坦地区。
2.5 航高确定
本摄区拟使用GalaxyPrime 机载激光雷达设备系统进行作业,根据设备扫描角度及脉冲频率,设计点云密度≥9 点/m2,摄区地形起伏,根据DEM 设计,确定绝对航高为2 900 m。
2.6 航线敷设
按照摄区范围和摄区平均基准面高程及摄区最高点高程进行航线设计。根据摄区的基准面高程,合理确定旁向重叠度。根据摄区形状分布的特点,摄区航线采用按摄区走势敷设的方法,测段接边重叠应不少于200 m,且宜选择在平坦地区;
采用DEM辅助航线设计[8];
每条航线的飞行时间不超过15min 以保证整个机载LIDAR 系统(GalaxyPrime)获得最佳的采集数据。
2.7 工程概况
2.7.1 地理概况
文山市,位于云南省东南部,东西横跨63 km,南北纵跨66 km,总面积2 977 km2。蒙自市东西最大横距61.3 km,南北最大纵距62 km,总面积2 228 km2。东邻文山市,主要地形为山区和坝区,其中山区面积占总面积的75.6%;
坝区面积占总面积的24.4%,县城海拔1 307 m。
2.7.2 摄区范围
根据表3 参数设定和航摄分区结果,对新建铁路进行勘察,文蒙线路长度约130 km,面积约283 km2。至此,实现基于机载LiDAR 点云稀疏处理的新建铁路勘察方法研究。
实验区LiDAR 点云数据运用机载激光雷达系统获取,采集时间2022 年4 月12 日。为准确分辨不同区段的LiDAR 数据处理高程精度,获取30 个点号高程数据,由此得到图1 所示的折线图。

图1 LiDAR 数据处理高程精度折线图
图1 为检校场测量出的高程与本文方法获取的LiDAR 数据处理的高程折线图。由图像可知,本文方法获取的高程折线图与检校场测量的高程折线图几乎完全重合,说明采用本文方法获取的数据检测结果较为精准。为准确分辨不同区段的LiDAR 数据处理高程精度,获取30 个点号多来源外业点高程,由此得到图2 所示的折线图。

图2 多来源外业点高程折线图
图2 为已知高程和本文方法高程折线图对比。根据图像可以清晰看出,采用本文方法处理的点云高程数据与已知高程数据高度一致,折线图基本重合。说明本文方法通过对航线的规划设计,以及有人机获取的新建铁路图像分割后,可以精准地获取铁路轨道,不被干扰因素影响,保持轨道的完整性。
基于机载LiDAR 点云预处理的新建铁路勘察方法,通过铁路机载LiDAR 点云数据采集、预处理、点云图像分割等,实现了对新建铁路的勘察。实验结果有效保证了提取铁路的完整性,获取的高程数据精准度较高,为新建铁路勘察提供参考。
猜你喜欢 激光雷达高程预处理 红树林宜林地滩面高程及潮水退干时间时长的测量方法绿色科技(2022年16期)2022-09-15预处理对医用外科口罩用熔喷布颗粒过滤性能的影响纺织标准与质量(2022年3期)2022-08-10场景高程对任意构型双基SAR成像的影响军民两用技术与产品(2022年1期)2022-06-01手术器械预处理在手术室的应用健康体检与管理(2022年4期)2022-05-13激光雷达实时提取甘蔗垄间导航线农业工程学报(2022年4期)2022-04-24污泥预处理-厌氧消化体系的能源经济性评价化工进展(2022年3期)2022-04-12法雷奥第二代SCALA?激光雷达汽车观察(2021年8期)2021-09-01融合激光雷达与超声波数据的障碍物检测方法科技研究·理论版(2021年20期)2021-04-20污泥预处理及其在硅酸盐制品中的运用建材发展导向(2021年23期)2021-03-088848.86m珠峰新高程当代陕西(2020年23期)2021-01-07