尚东阳,李小彭,尹猛,李凡杰,杨贺绪
(1.东北大学机械工程与自动化学院,110819,沈阳;2.中国科学院深圳先进技术研究院,518055,广东深圳)
柔性机械臂是一个非线性的复杂系统,它广泛的应用于航天探索[1]、工业装配[2]等领域。相比较于传统的刚性机械臂,柔性机械臂具有回转半径更大和轻质的特点[3]。目前,关于柔性机械臂建模的方法主要分为假设模态法和有限元法两大类。文献[4-6]使用假设模态法建立了转角与模态坐标相耦合的柔性机械臂的动力学方程;文献[7-8]使用有限元法建立包含柔性关节的柔性机械臂动力学方程。在柔性机械臂的动力学建模过程中,往往假设柔性机械臂在水平面运动[9-10]。但是,在一些实际的柔性机械臂应用过程中需要考虑重力因素。文献[11]在双柔性机械臂建模过程中将重力因素予以考虑。文献[12]在含有柔性关节的机械臂伺服系统建模过程中将重力因素予以考虑。重力被引入动力学方程,因此在柔性机械臂动力学建模的过程中需要考虑重力因素。
关于柔性机械臂动力学系统的控制策略,主要包括主动控制和被动控制两大类。主动控制策略主要包括PID控制[13-14]、滑模控制[15-17]等。柔性机械臂相比较于刚性机械臂需要考虑更多的非线性因素。这种柔性耦合的非线性因素为动力学系统控制器的设计带来了困难。文献[10,18]在设计控制律过程中忽略了柔性耦合非线性因素的影响。若在柔性机械臂动力学建模过程中考虑重力因素,则又一次引入了非线性因素。由此,控制器设计的难度进一步增大。文献[19]通过增加具有非线性项的内控回路补偿重力因素对于刚性机械臂的影响。
神经网络广泛地应用于系统不确定项的辨识。文献[20]使用神经网络对时变的机械臂动力学系统中的不确定项进行了辨识,由此提高了控制精度;文献[21]使用神经网络对套索传动系统进行辨识,调高了套索传动的跟踪精度。因此,可以使用神经网络对柔性机械臂动力学系统中的柔性耦合非线性项进行辨识,然后以内控回路的方式对输入力矩进行补偿。
根据文献[22-23],本文将柔性机械臂等效为柔性梁模型。使用假设模态法建立了柔性机械臂伺服系统的动力学方程。在动力学的建模过程中将重力因素加以考虑。本文使用径向基(RBF)神经网络对柔性机械臂动力学系统的不确定项进行辨识,利用神经网络辨识的控制策略减弱柔性机械臂的振动。
柔性机械臂在静态坐标系XOY所在的竖直面内转动,它的质量用m表示,长度用l表示。在驱动力矩Γdrive的作用下,柔性机械臂任意一点会出现微小的变形w(x,t)。为了便于准确地描述柔性机械臂任意一点位置,构建随动坐标系x0Oy0。随动坐标系和静态坐标系之间的角度θ表示表示柔性机械臂转角。柔性机械臂在竖直平面内旋转的过程中还会受到重力mg的影响。柔性机械臂竖直面转动示意如图1所示。

图1 柔性机械臂竖直面转动示意Fig.1 Schematic diagram of vertical rotation of flexible manipulator
根据文献[10,24],在运动过程中的t时刻,柔性机械臂x处的变形可以用模态坐标和模态函数来描述
(1)
式中:φi(x)表示模态函数;δi(t)表示模态坐标。
根据式(1)可知,柔性机械臂的变形量是机械臂长度和时间的二维函数。其中,模态函数的取值与柔性机械臂的边界条件密切相关。忽略柔性机械臂末端质量影响,当柔性机械臂以一端固定、一端自由方式连接时,其边界条件为
(2)
式中:E表示弹性模量;I表示截面惯性矩。
根据柔性梁的振动理论,由文献[10]可推导出模态函数的表达式
(3)
式中βi表示模态函数特征根,表达式为
cos(βil)ch(βil)=-1
(4)
模态函数特征根与柔性机械臂的固有频率之间存在关系
(5)
式中:ωi表示柔性机械臂的第i阶固有频率;ρ表示柔性机械臂的体密度;A表示柔性机械臂的横截面积。
柔性机械臂上任意一点的向量可表示为
(6)
由此,得到柔性机械臂的动能
(7)
柔性机械臂的势能可以近似地表示为
(8)
根据拉格朗日动力学方程,可得到
(9)
根据式(9)可得考虑重力影响的柔性机械臂动力学方程
(10)
为简化柔性机械臂的动力学方程,本文定义式(11)成立。
(11)
式中:Jl表示柔性机械臂的转动惯量;Fai表示柔性机械臂的柔性耦合系数。
将式(11)代入式(10),可将竖直平面内转动的柔性机械臂的动力学方程改写为
(12)
柔性机械臂的动力学方程中含有两种类型的非线性项:一种是转角和模态坐标耦合的弱非线性项;另一种由于重力因素而引起的强非线性项。文献[10]为了获得柔性机械臂转角与力矩之间的传递函数,不考虑转角和模态坐标耦合的非线性项,忽略了弱非线性项的影响。此时,柔性机械臂动力学的动力学方程为
(13)
弱非线性项会对柔性机械臂的动力学系统产生一定的影响。为了探究弱非线性项对于柔性机械臂动力学系统的影响,本文使用文献[25]提出的单杆演绎算法作为柔性机械臂转角的运动规律。
本文使用角度独立方法[24]对柔性机械臂动力学系统进行数值仿真分析。以此说明弱非线性项对于柔性机械臂动力学系统的影响规律。
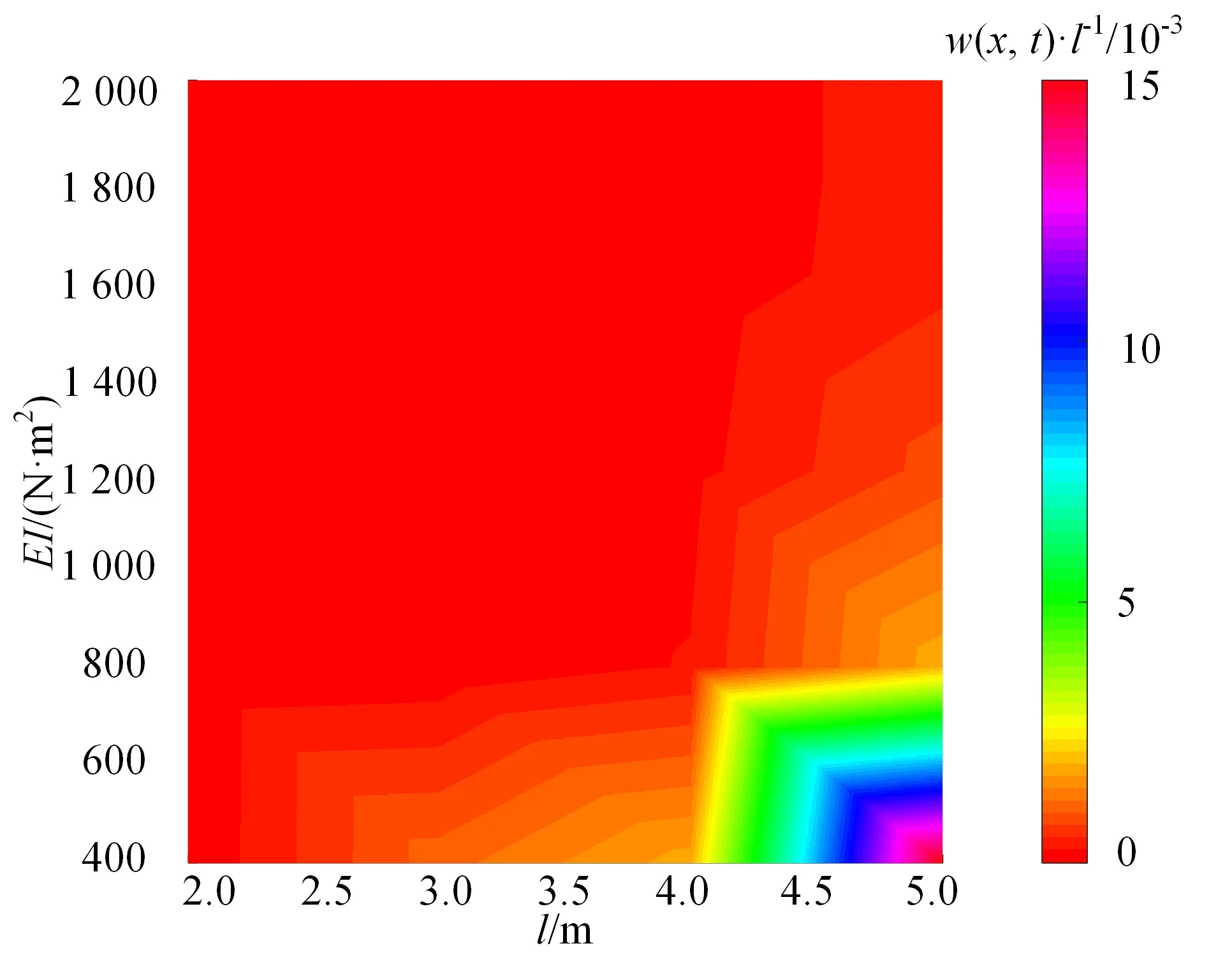
在考虑重力的情况下,杆长、弹性模量、最大转速等会对于柔性机械臂的末端变形量产生影响。在低速情况下,最大转速设定为3 rad/s;在高速情况下,最大转速设定为6 rad/s。在只考虑一阶模态的情况下,可以得到柔性机械臂末端变形量的分布情况和非线性项对于变形的误差,如图2所示。
为了清晰地描述杆长对于柔性机械臂变形的影响,本文使用末端变形量与机械臂长的比值表征变形能力。根据图2可以得出如下结论。
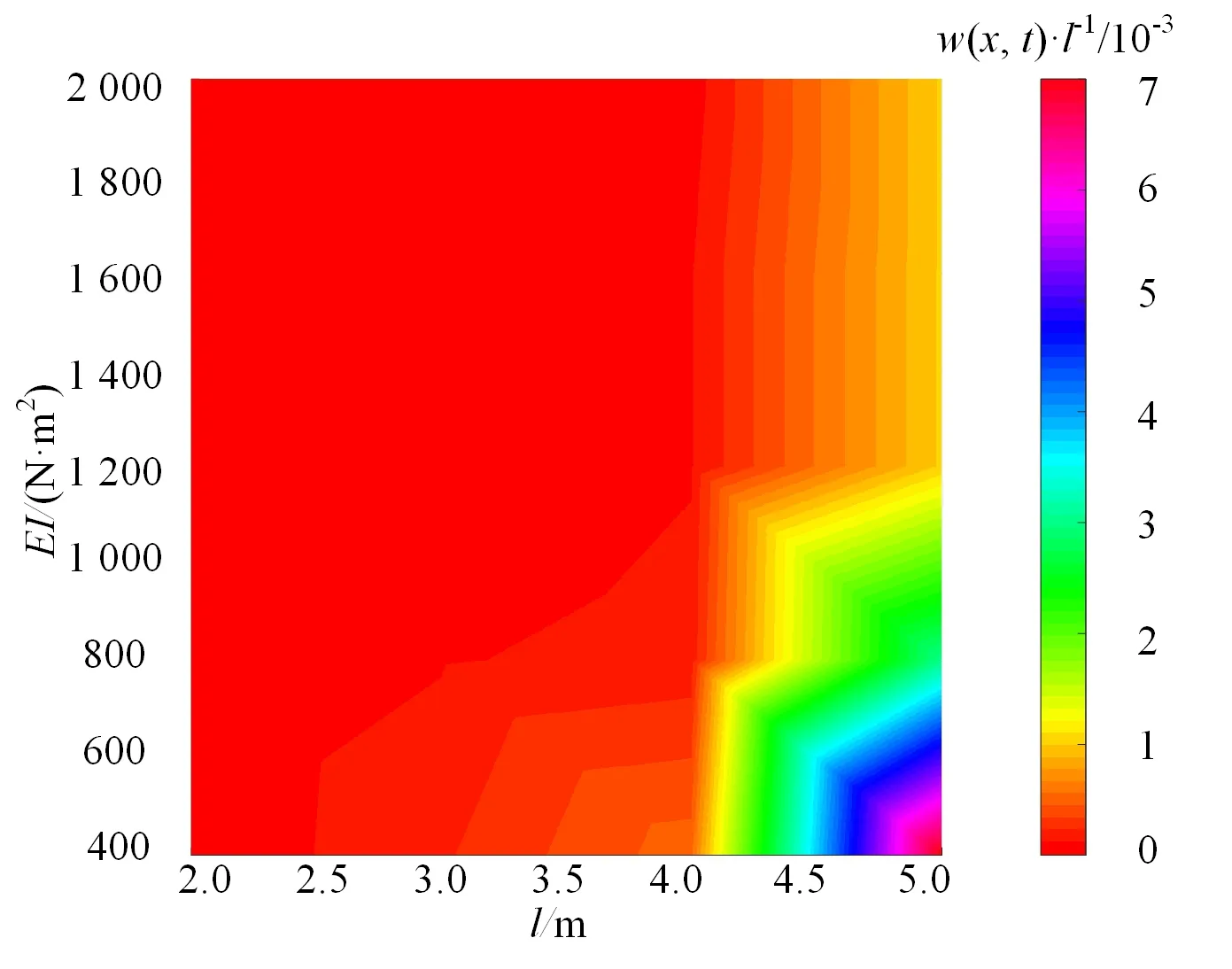
(1)柔性机械臂末端的单位长度变形量随着杆长的增加而增大、随着弹性模量的增大而逐渐减小。在高速和低速运动状态下都可以得到相同的结论。
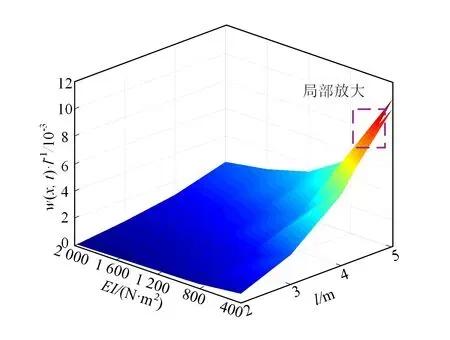
(a)低速情况下单位长度变形量分布
(b)低速情况下单位长度变形量分布的局部放大
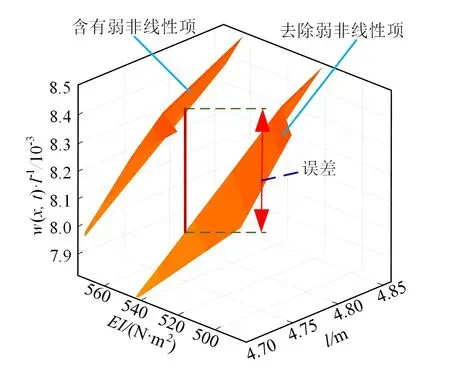
(c)低速情况下变形误差分布
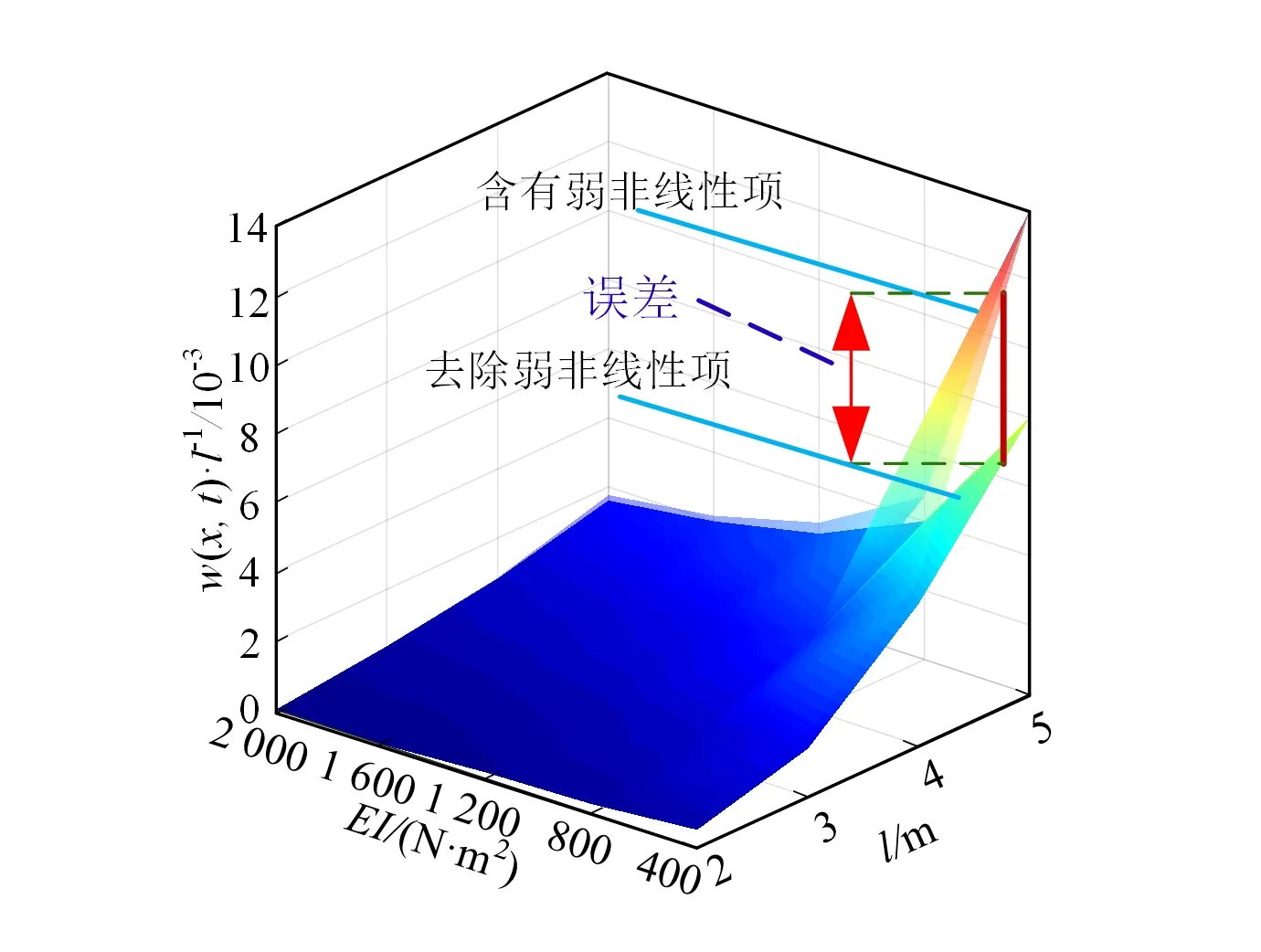
(d)高速情况下单位长度变形量分布
(e)低速情况下变形误差分布图2 柔性机械臂末端变形量及误差分布Fig.2 Deformation and error distribution of the flexible manipulator
(2)柔性机械臂末端的单位长度变形量在高速运动状态下更为显著。其主要原因在于高速运动所需的外加力矩更大,使得柔性机器臂变形更加明显。
(3)无论是考虑还是忽略非线性项,都能得到相同的结论——柔性机器臂末端的单位长度变形量随着杆长的增加和弹性模量的减小而增大。
(4)在低速运动状态下可以忽略弱非线性项引起的误差,而在柔性机械臂长度较长且处于高速运动状态下不能忽略。
综上可知,当柔性机械臂的长度较长且处于高速运动工况下,由弱非线性项引起的误差不能忽略。
本文在柔性机械臂的内控制回路中引入非线性补偿抵消重力的影响,使用RBF神经网络对柔性机械臂动力学系统的不确定部分进行辨识。
3.1 动力学模型的不确定性
根据式(11)可得到柔性机械臂动力学方程的一般形式
(14)
式中d可以认为是柔性引发的干扰。
前馈控制策略比反馈控制策略更及时、有效[26]。前馈PD控制策略的控制律为
(15)
针对柔性机械臂的名义动力学模型,控制律为
(16)

根据式(16),可以得到
(17)
由式(17)可得到考虑动力学模型不确定性情况下的闭环方程
(18)
式中f表示不确定项。
3.2 具有RBF神经网络辨识的控制律设计
RBF神经网络算法为
(19)

根据式(19),柔性机械臂动力学模型的误差状态空间方程可以写成
(20)
应用RBF神经网络辨识不确定项后,柔性机械臂的控制律为
(21)
本文做如下假设:
(2)RBF神经网络输出逼近连续函数不确定项,存在一个极小的正数ε0满足
(22)
(23)
现实情况下无法获得最优的神经网络权重系数。因此,只能用最优的神经网络权重系数的估计值进行代替。此时,柔性机械臂的控制律为
(24)

使用RBF神经网络辨识不确定项后,柔性机械臂的控制回路示意如图3所示。
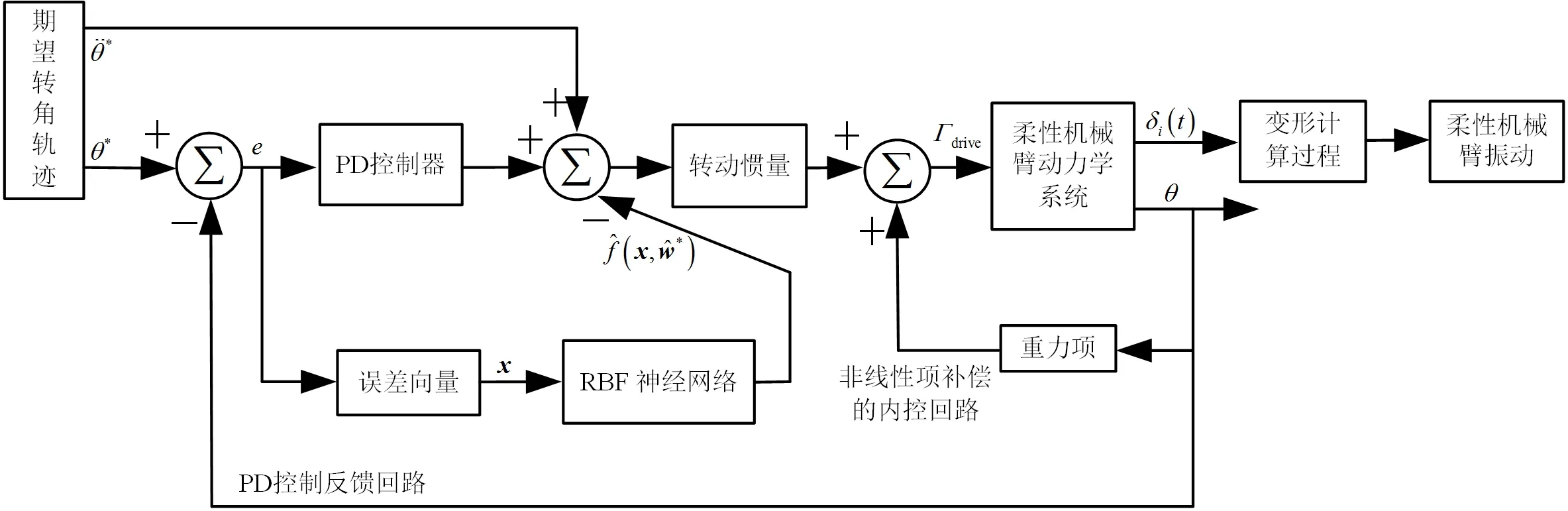
图3 基于RBF神经网络的柔性机械臂控制框图Fig.3 Control block diagram of the flexible manipulator based on the RBF neural network
3.3 稳定性证明
使用RBF神经网络辨识不确定项部分后得到如式(24)所示的控制律。将式(24)代入式(14)中,得到
(25)
根据式(25)可得到误差状态空间方程
(26)

定义Lyapunov函数
(27)
式中:γ>0;P是一个正定矩阵且满足Lyapunov方程
PA+ATP=-Q
(28)
其中Q是一个正定矩阵。
将式(27)写成
(29)
根据式(29),有式(30)成立。
(30)
式中M表达式为
(31)
式(31)可以写成
(32)
权重系数的自适应律为
(33)
将式(33)代入式(32)后,可以得到Lyapunov函数的导数
(34)
4.1 实验原理

图4 柔性机械臂控制实验平台 Fig.4 Control experimental platform of the flexible manipulator
本文搭建了验证柔性机械臂控制策略的实验平台,如图4所示。该实验平台由伺服电机、传动套索、柔性机械臂组成。柔性机械臂在竖直面转动,套索将电机产生的力矩传送到柔性机械臂,驱动其转动。可以通过套索上的拉力传感器,准确地计算出柔性机械臂的输入力矩。控制平台使用cRIO-9053作为下位机,将采集到的反馈信号输入控制程序。同时,将控制程序的输出信号传入Ni-9246模块,控制电机的输出力矩。反馈信号通过磁编码器采集。其中,磁编码器安装在柔性机械臂后端,用以采集柔性机械臂的转角信号。
4.2 实验数据分析
分别采用长度为0.8、1.1、1.5 m的柔性梁模拟不同长度的柔性机械臂。3种不同长度柔性梁的物理参数如表1所示。
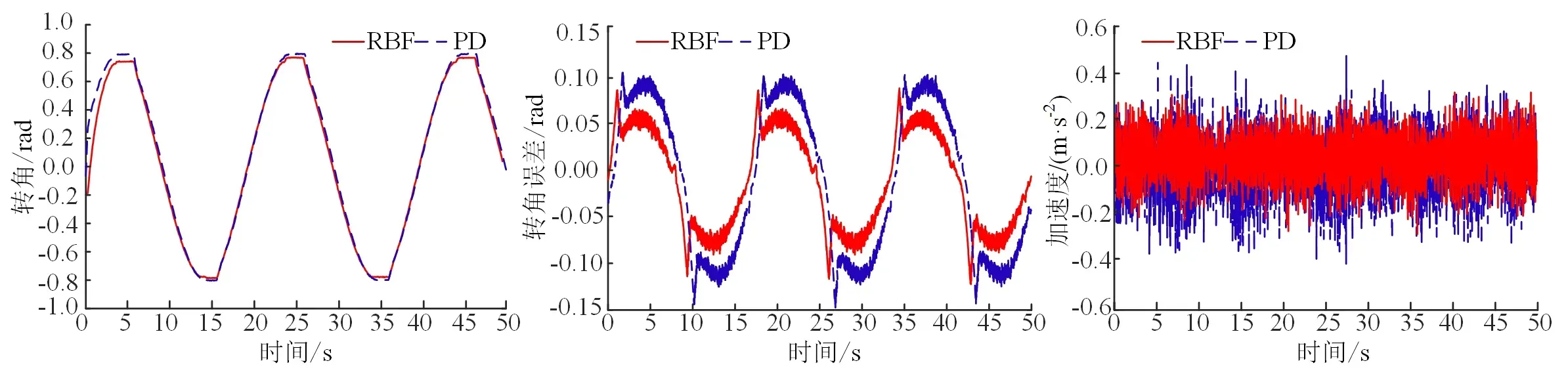
以正弦信号作为柔性机械臂转角的输入信号。分别使用两种不同的控制策略开展柔性梁的转角控制实验。其中,一种控制策略是PD控制策略,另一种控制策略是使用具有RBF神经网络辨识的控制策略。由此可得不同长度柔性梁的转角、转角误差、末端振动敏感方向的加速度,如图5所示。对不同长度柔性梁的转角误差和末端加速度进行统计分析,统计结果如表2所示。
根据表2可知:使用RBF神经网络的控制策略在柔性机械臂长度较长时能够使转角误差绝对值的平均值下降49.6%、转角误差的方差下降76%,柔性负载末端加速度绝对值的平均值下降27.3%、加速度的方差下降5.8%。由此说明,使用神经网络的控制策略能有效地提高柔性机械臂的转动精度,并且利于抑制机械臂的振动。

表1 不同长度柔性梁的物理参数

(a)l=0.8 m
(b)l=1.1 m
(c)l=1.5 m图5 l=0.8,1.1,1.5 m时的转角、转角误差和柔性负载末端振动敏感方向的加速度Fig.5 Rotation angle, rotation angle error, acceleration in vibration-sensitive direction at the end of the flexible load when l=0.8,1.1 and 1.5 m
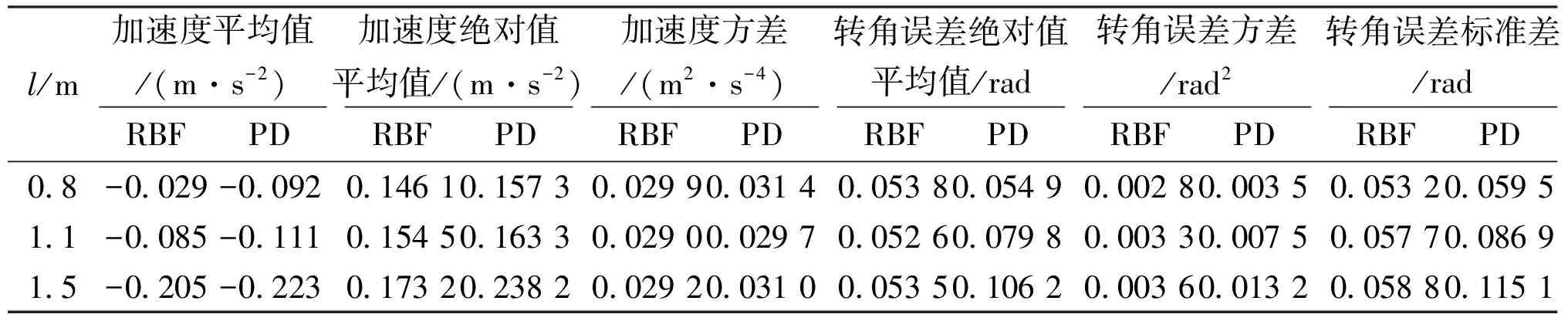
表2 实验结果统计表
由图5可知,使用RBF神经网络的控制策略拥有更小的转角误差,并且在机械臂长度较长时具有明显的优势。在机械臂长度较长时,使用RBF神经网络的控制策略能够有效减少机械臂末端的加速度波动。使用传统的PD控制策略无法应对弱非线性项的影响,由此导致在柔性机械臂长度增加时无法获得准确的跟踪效果。这间接说明了弱非线性项对于柔性机械臂的影响在机械臂长度较长的情况下无法忽略。
本文建立了考虑重力因素的柔性机械臂动力学模型,并应用RBF神经网络控制策略减小机械臂输出转角的波动,进而抑制振动。本文结论如下。
(1)重力因素会严重影响柔性机械臂输入力矩。若柔性机械臂在竖直面内运动,则需要将重力因素加以考虑。
(2)柔性机械臂动力学方程中含有柔性耦合的弱非线性项。在机械臂长度较长且高速的情况下,应考虑非线性项的影响。
(3)对于柔性机械臂,在转速相同的情况下,RBF神经网络的控制策略与传统比例微分控制策略相比,使机械臂末端振动敏感方向的加速度方差降低了27.3%。由此说明本文方法对于振动敏感方向的加速度波动的抑制具有更好的效果,进而说明本文方法能够更好地抑制柔性机械臂的振动。
猜你喜欢 转角动力学模态 《空气动力学学报》征稿简则空气动力学学报(2022年4期)2022-08-23联合仿真在某车型LGF/PP尾门模态仿真上的应用汽车实用技术(2022年10期)2022-06-09具有Markov切换的非线性随机SIQS传染病模型的动力学行为黑龙江大学自然科学学报(2022年1期)2022-03-29基于老年驾驶人的多模态集成式交互设计研究汽车工程师(2021年12期)2022-01-17百花深处小资CHIC!ELEGANCE(2019年20期)2019-07-02模态可精确化方向的含糊性研究成长·读写月刊(2018年8期)2018-08-30一种门窗转角连接件中国建筑金属结构(2018年4期)2018-05-23用动力学观点解决磁场常见问题的研究中学生理科应试(2017年7期)2017-08-09利用相对运动巧解动力学问题お中学物理·高中(2016年8期)2016-08-08日版《午夜凶铃》多模态隐喻的认知研究电影新作(2014年1期)2014-02-27