段琦玮孙 涛郝洪亮朱鸿飞雷振锋夏天奇
(中国大唐集团新能源科学技术研究院有限公司,北京市 西城区 100052)
目前针对无刷双馈电机的研究热点主要为电机建模、本体分析及优化。俄亥俄州立大学的研究团队在1989年首次提出了无刷双馈电机在三相静止坐标系下的多回路数学模型并进行了仿真验证[1-3],依据此模型又提出了无刷双馈电机转子速两相坐标系下的模型[4]。基于转子速两相坐标系下的模型,陆续有研究人员提出了各种改进模型并以此提出了控制策略[5-10]。2002年,西班牙学者POZA J提出了考虑笼型转子特殊结构的统一坐标系下的矢量模型,此模型将转子每个笼型结构中的回路数等效为一个并以此给出了矢量控制策略[11-13]。2005年,剑桥大学ROBERTS在其博士论文中详细阐述了统一的动态和静态模型—耦合电路模型(coupled-circuit model),并给出了在耦合电路模型和d-q坐标系下的电机参数计算方法[14]。2008年,FARHAD 等人提出了特殊笼型转子无刷双馈电机的统一矢量模型[15],并在转子磁链矢量定向坐标系下对模型进行了仿真验证[16]。该模型考虑了转子每一笼型中所有环路的影响,同时可以通过对自由变量的不同取值将模型定位于不同的坐标系。
本文针对特殊笼型转子无刷双馈电机的耦合电路模型,通过Simulink仿真软件进行建模,通过开环仿真实验,验证模型对电机的动静态性能的运行结果仿真的准确性。
无刷双馈电机的定子由2套独立的、无直接耦合的三相绕组组成,功率绕组直接同电网连接,控制绕组接变流器。转子主要有3 种结构:特殊笼型转子[17-21]、绕线转子和磁阻转子[22-25]。本文研究所用样机为一台特殊笼型转子的无刷双馈感应电机,其功率绕组和控制绕组的极对数比为4∶1,转子每个笼型结构有5个回路,没有公共端环,转子结构如图1所示。

图1 无刷双馈感应电机转子结构Fig.1 Rotor structure of brushless doubly-fed induction motor
无刷双馈感应电机的耦合电路模型为


根据式(1)(2)对无刷双馈感应电机进行建模。给定电流矢量初始值均为0,功率绕组电压幅值为220 V。由于样机转子为6个笼型结构,每个笼型结构为5个回路,可知转子电流矢量为30阶矩阵,可通过Matlab/Simulink中S函数进行编程求解。
本节通过对电机不同运行状态的动静态性能进行仿真实验,验证建立的仿真模型对电机运行状态的仿真模拟效果。
第一,农村非正规金融经营管理较为混乱,经营风险较大。大部分农村非正规金融组织没有建立规范的内部控制制度,没有严格的财务管理及审计稽核制度,不提取存款准备金和呆帐准备金。作为自发性的金融活动,非正规金融组织资金实力较弱,筹资能力有限,资金运用局限在一个较小的范围内,资产负债率较高,业务人员缺乏必要的专业知识,经营缺乏长远规划,唯利是图。如果市场发生急剧变化,遇到较多的贷款逾期收不回,就会给其经营带来困难。一旦出现挤兑,由于没有国家信用作担保,将会造成资金链断裂,极易出现倒闭破产情况。
2.1 空载超同步、亚同步运行转速变化动态响应仿真
为验证电机模型在超同步、亚同步运行时的动静态响应,本节给定变化的控制绕组电压频率、相序和幅值,同时给定空载转矩,来验证所搭建的模型对转速变化响应的正确性。
电机给定运行状态为:电机短接启动后控制绕组接直流电压迁入同步速,转速应为600 r/min,稳定后在3.09 s时控制绕组变为频率2 Hz、电压幅值为8 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为624 m/s。4.66 s时控制绕组变为频率5 Hz、电压幅值为70 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为660 m/s。7 s时控制绕组变为频率7 Hz、电压幅值为90 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为684 m/s。8.3 s时控制绕组变为频率7 Hz、电压幅值为90 V 的与功率绕组逆相序的交流电供电,此时电机应运行在亚同步速,转速应为516 m/s。11 s时控制绕组变为频率6 Hz、电压幅值为90 V 的与功率绕组逆相序的交流电供电,此时电机应运行在亚同步速,转速应为528 m/s。12.2 s时控制绕组变为频率5 Hz、电压幅值为70 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为660 m/s。14 s时控制绕组变为频率7 Hz、电压幅值为90 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为684 m/s。功率绕组接220 V,50 Hz 三相电。负载转矩给定为0。
电机运行仿真转速、转矩、功率绕组A 相电流、控制绕组A 相电流结果如图2所示。可知电机由空载启动到同步速,之后进入超同步运行和亚同步运行期间,转速运行值符合理论值,功率绕组、控制绕组电流会同步转速的变化而变化,转矩在同步运行状态变化时有较大波动,总体脉动较大,符合特殊笼型转子电机的特点。
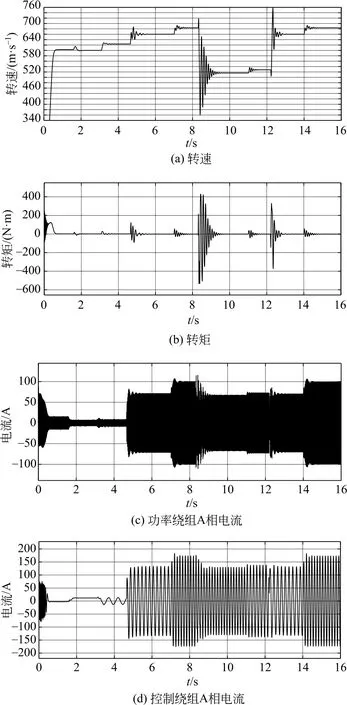
图2 空载超同步、亚同步运行转速变化动态响应仿真结果Fig.2 Simulation results of dynamic response to speed change between super-synchronous and sub-synchronous under no-load operation
2.2 负载超同步、亚同步运行转速变化动态响应仿真
本节控制绕组、功率绕组给定输入同2.1节,电机空载启动后4 s时负载转矩变为20 N·m。仿真结果如图3所示。

图3 负载超同步、亚同步运行转速变化动态响应仿真结果Fig.3 Simulation results of dynamic response to speed change between super-synchronous and sub-synchronous under load operation
由图3转速响应结果可知在电机空载启动到超同步速加入负载后,电机转速有微小波动后继续跟随控制绕组输入电压变化而变化,表明在负载运行时电机模型可以准确模型动静态响应。
2.3 超同步运行时负载转矩变化动态响应仿真
本节验证针对特殊笼型转子无刷双馈电机搭建模型在同步运行状态下,负载转矩突变对电机电磁转矩及电机转速的影响。假设无刷双馈电机在0~1.8 s时空载异步启动,当电机转速接近步速时,控制绕组两并一串接直流励磁,随后电机进入稳定同步运行状态。3.09 s时控制绕组变为频率2 Hz、电压幅值为8 V 的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为624 m/s。4.66 s时控制绕组变为频率5 Hz、电压幅值为70 V的与功率绕组同相序的交流电供电,此时电机应运行在超同步速,转速应为660 m/s。6 s 时负载从0 N·m 突变到175 N·m,之后开始连续变化,6~8 s时负载转矩减小到0,8~18 s时负载转矩发生连续阶跃变化。在此工况下对无刷双馈电机进行负载突变动态特性仿真研究。动态响应仿真结果如图4所示。

图4 超同步运行时负载转矩变化动态响应仿真结果Fig.4 Simulation results of dynamic response to load change during super-synchronous operation
由仿真结果可以看出:电机超同步运行时,当负载转矩发生连续性变化时电磁转矩快速跟随使电机保持转速稳定运行,当负载转矩发生阶跃性变化时,电磁转矩迅速反应之后跟随负载变化,使电机转速会有一个短暂的动态变化,随后再次稳定运行在给定转速状态下。以上仿真可以说明所搭建模型在超同步运行状态时电机转速对负载变化的动态响应稳定。
2.4 同步运行励磁失去后恢复再牵入同步动态响应仿真
针对电机模型在同步运行状态下,失去控制绕组励磁电流和恢复励磁再牵入同步的过程进行仿真,对电机转速,电磁转矩的动态响应进行仿真分析。假设负载转矩恒定为40 N·m,无刷双馈电机在0~1.8 s内异步启动,之后进入同步运行,3.4 s时控制绕组电压由10 V 突降为0 V,4.8 s时电压恢复为初始值10 V。仿真波形如图5所示。
由图5的仿真结果可以看出,电机同步运行时,当控制绕组突然失去励磁电压时,电机转速和电磁转矩会有短暂的波动,然后转矩恢复到原来的数值,此时电机处于异步运行状态,但转子以一个稳定的近同步速运行,转速与异步运行时转速相同。当控制绕组直流电压恢复时,电磁转矩会迅速做出反应使得电机转速经过短时间的调整以后再次牵入同步状态。
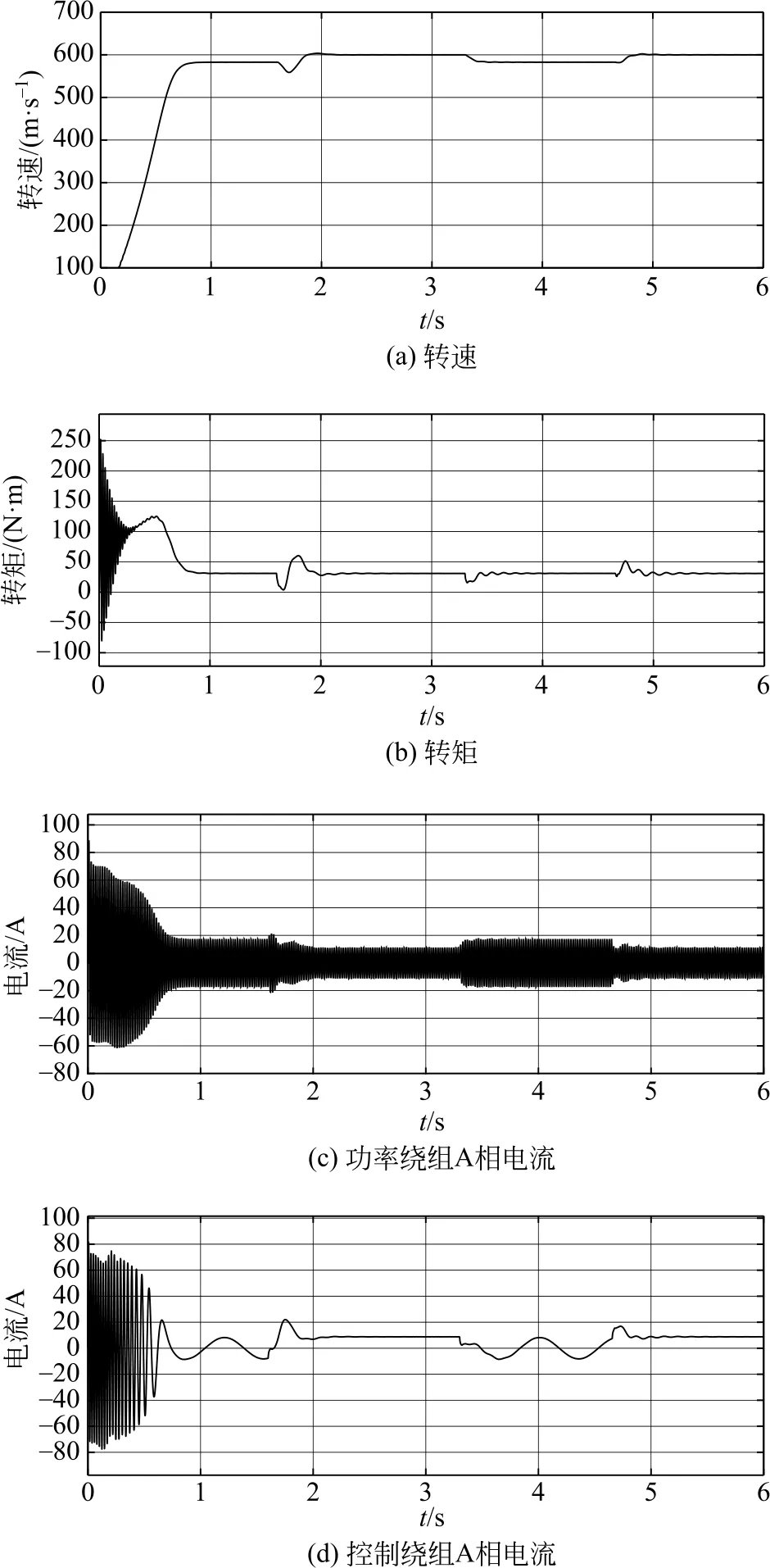
图5 同步运行励磁失去后恢复再牵入同步动态响应仿真结果Fig.5 Simulation results to dynamic response after recovery from excitation loss in synchronous operation
本文针对无刷双馈电机的耦合电路模型,建立了定转子电流为变量的一阶微分方程,并基于功率绕组和控制绕组极对数比为4∶1、转子有5个巢型结构、每个巢型结构有6个短路环的特殊笼型转子无刷双馈感应电机样机参数,通过Matlab/Simulink软件建立其数字仿真模型,开环运行仿真试验,试验结果表明了建立的仿真模型可以准确地模拟出电机不同运行方式的动静态性能,同时可以体现出无刷双馈电机转矩脉动较大,转速变化时波动较大等特性。该模型可对电机闭环控制的研究提供有力地支撑。
猜你喜欢 幅值绕组转矩 室温下7050铝合金循环变形研究装备维修技术(2022年7期)2022-07-01基于滑膜控制的船舶永磁同步推进电机直接转矩控制研究舰船科学技术(2022年10期)2022-06-17一种抑制半直驱永磁风力发电机短路转矩的方法防爆电机(2022年3期)2022-06-17基于Ansys Maxwell 2D模型的感应电动机转矩仿真分析防爆电机(2022年2期)2022-04-26双速感应电机绕组耦合度研究防爆电机(2022年1期)2022-02-16基于霍尔位置信号的无刷直流电机直接转矩控制电机与控制学报(2018年9期)2018-05-14可靠性步进电机细分驱动技术研究中国新技术新产品(2018年22期)2018-01-05平地机作业负载谱分析筑路机械与施工机械化(2016年12期)2017-01-13电动机绕组故障分析及处理方法农机使用与维修(2014年1期)2014-09-23基于单片机的低频信号发生器设计现代电子技术(2014年16期)2014-08-20