崔巨月
(安徽省地质测绘技术院,安徽 合肥 230022)
当前,随着无人机航测技术的日益成熟,基于无人机倾斜摄影测量的三维建模方式正在智慧城市等领域发挥着巨大作用。无人机作为一个高效、机动的飞行平台,弥补了大飞机航测效率低、成本高等诸多方面的不足,而倾斜摄影测量采用多相机系统进行拍摄,可以同时获取到地面物体多个角度的影像以及精细的侧面纹理信息,再使用专业三维建模软件对影像进行处理,最终可生成带有真实纹理信息的实景三维模型[1]。相比传统的人工建模方式,无人机倾斜摄影测量具有效率高、周期短、数据真实以及精度高等优势。
无人机倾斜摄影测量三维建模的主要步骤包括外业采集数据预处理、影像匹配、多视影像联合平差、多视影像密集匹配、点云构建、纹理映射、精度评价,其作业流程如图1所示。

图1 无人机倾斜摄影测量三维建模作业流程
(1)影像匹配。影像匹配是三维模型生成的基础,匹配精度将会影响到后续成果的质量。在影像匹配方法中,基于特征的影像匹配精度较高并且适应力较强,当前主流的倾斜摄影三维建模软件均采用此算法进行影像匹配。该算法对同一地物影像的色彩特征有一定的依赖性,若将航飞时间间隔长或者光照条件差异大的影像放在同一个加密区进行匹配,则容易出现错误匹配的情况。为了提高影像匹配的正确率,在实际生产中可以通过以下方法来实现:进行外业数据获取时,严格控制航飞的时间,尽可能在一致的光照条件下对相邻地物影像进行采集;
提高POS数据的精度;
对原始影像数据的色彩进行均一化的处理。
(2)多视影像联合平差。航摄时可搭载高精度的定位设备,如定位定姿系统(POS)来获得无人机平台的参数,如航高、曝光时间、姿态角等。通过对区域网进行平差计算,将连接点进行匹配,最后再剔除粗差点,直到所有连接点的重叠度、数量、像方误差、分布等满足规范要求,即可完成多视角联合空中三角测量,解算出各影像的外方位元素[2]。在利用软件进行多视角影像平差时,为了提高平差的精度及平差效率,可采取以下措施:对于加密区的划分需考虑地形及航飞因素,并尽可能将地物特征少的区域划分在加密区的中间;
若同一加密区内涉及多个航飞架次的数据,手动增加连接点以增强架次之间的连接性;
先转刺加密区四角上的控制点,在完成一次平差后,再转刺剩余的控制点。
(3)多视影像密集匹配。选取最优的影像匹配单元,经滤波处理和多视影像密集匹配,获得高密度实景数字表面模型(Digital Surface Model,DSM)数据。在处理过程中,由于部分影像缺少足够的同名点或被遮挡,生成的模型会有匹配精度不高、拉花的现象,这些问题需要人工编辑修改。在匹配过程中难免还是会出现匹配误差较大的粗差点,例如大片水域区域、高层建筑物以及阴影长的区域,因此在实际生产中,在密集匹配阶段需要做部分人工干预的工作。在使用软件完成密集匹配的过程中,可通过以下方式降低匹配的错误率:通过分析测区的地形,确定测区内的最小高程及最大高程,限制匹配的高程范围;
对易产生错误匹配的区域的影像进行人工筛查;
在保证重叠度的情况下将部分影像从加密区中剔除。
(4)点云构建。倾斜摄影测量构建的三维模型本质为网格面模型,因此利用超高密度点云来进行网格面的点云构建。具体方法为:第一步,利用物体影像在不同方向上的信息,以非固定的匹配策略采用参考方式对地物影像进行逐像素匹配;
第二步,基于多视影像的冗余信息来获取同名点的精确三维坐标,进而得到高密度点云数据;
第三步,基于生成的点云数据经三角网优化和简化过程,最终生成逼真的三维实景白模模型。
(5)纹理映射。垂直影像和倾斜影像经匀光匀色处理、畸变差改正后,需要提取出对应位置的纹理信息,同时需要将该信息映射到三维白模的三角面片上,此过程称作纹理贴附,目的是生成逼真并且纹理清晰的三维实景模型[3]。纹理映射的本质是将二维空间点的RGB信息值映射到三维空间物体的表面,进而得到符合人体感官视觉的实景三维模型。在纹理映射过程中,由于同一地物信息会在多张多视影像中显示,而纹理映射数据源需要目标清晰的影像,在软件自动处理的过程中,为了提高纹理映射的质量并减少倾斜模型的数据量,需要注意以下两点:纹理压缩率设置为75%,可在保证倾斜模型视觉效果的基础上减少倾斜模型的数据量;
开启软件的自动色彩过渡功能,可以减弱不同架次间的纹理色差问题。
2.1 实验数据获取
作业对象为合肥市800 m×500 m的某社区,采用上海某公司生产的AMC536五镜头高分辨率无人机倾斜摄影系统获取地面影像,该系统以六旋翼无人机作为飞行平台,有效载荷为2.5 kg,续航时间为40 min。摄影系统由5台SONY ILCE-7R面阵数码彩色相机组成,一台下视相机获取垂直影像,另外4台相机获取倾角为45°的倾斜影像。平台飞行相对航高约150 m,单张像片7 360×4 912像素,覆盖面积0.76 km2,单像素地面分辨率为2.73 cm,获取21条航线,每条约30张像片,航、旁向重叠率均为75%,共636张像片作为数据源,采用Contextcapture软件,结合野外实做23个像片控制点,经过空中三角测量加密后,构建区域TIN,密集匹配生成该区域的密集点云数据。根据得到的对应各个面元的纹理数据,将其映射到建筑物的几何框架模型完成纹理贴图,最终生成约0.40 km2的三维实景模型。
2.2 精度评价
(1)空三精度分析。与传统摄影测量一样,倾斜摄影测量数据处理的关键步骤还是空中三角测量,后续三维建模的质量取决于空中三角测量的精度。因此,在空中三角测量过程中,精度控制至关重要。其中,中误差作为衡量观测精度的一种数学标准,能够较好地反映出误差精度,在ContextCapture软件中也是采用该方法对空三精度进行评价。从实际生产经验的角度出发,倾斜摄影空三成果的误差必须控制在1.5倍像素内。本次试验区共划分45个加密区,最终空三精度统计结果如表1所示。从统计结果看,试验区空三加密成果的误差是优于1.5倍像素的,可以用于后续的三维建模。

表1 空三精度统计表 单位:cm
(2)整体模型精度分析。在进行倾斜三维模型的整体精度评价时,将没有参与平差的外业实测RTK(Real-time kinematic,实时差分定位)点作为检查点,并量测获取对应点在倾斜三维模型上的三维坐标点,求取差值并统计平面精度及高程精度。需要注意的是,在软件生成三维模型后,利用Acute3DViewer查看器进行坐标量取时,需要选取与实际成果坐标系一致的坐标系系统,并进行多次量测,取平均值,从而确定模型上相应点的坐标值。本次试验区共外业实测580个检查点,其中建筑物立面点219个,地面点361个,精度统计情况如表2所示。从统计结果可以分析得出,在控制点布设合理的情况下,倾斜模型的平面中误差优于2倍的影像分辨率,高程中误差优于3倍的影像分辨率,且地面点精度高于建筑物立面点精度。
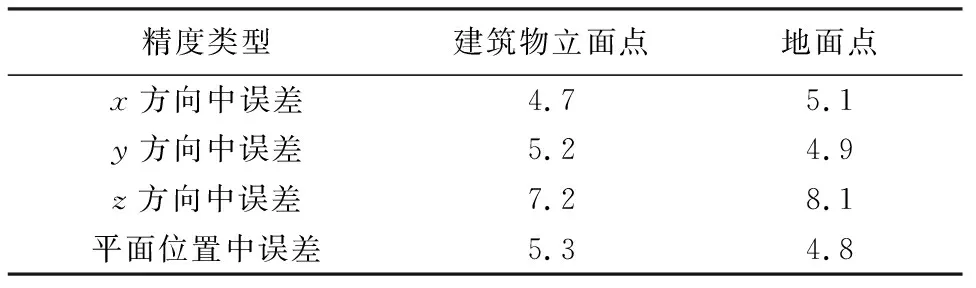
表2 倾斜模型精度统计表 单位:cm
目前,大规模三维实景模型构建的主流选择是倾斜摄影技术,就是因为它可以创造性地获取多视角影像。本文剖析了实际生产中基于软件构建高精度三维模型的关键技术及实现流程,总结了提高倾斜模型质量及生产效率的经验,并以合肥市某项目区为实验区,对空三成果精度和模型精度进行分析,利用实地测量检查点坐标数据与模型成果坐标数据进行对比,验证了倾斜摄影三维模型可以达到的精度。但是,在实际生产过程中,倾斜摄影三维建模效果及精度的优劣对原始采集数据的依赖性大,因此在后期的生产实践中,需要对倾斜摄影数据采集质量的控制及原始数据的预处理进行进一步的研究,从而提高倾斜摄影三维建模效果及精度的稳定性,实现倾斜摄影三维模型产品的广泛应用。
猜你喜欢 实景纹理加密 数字博物馆 线上实景游华人时刊(2021年23期)2021-03-08保护数据按需创建多种加密磁盘电脑爱好者(2020年6期)2020-05-26肺纹理增多是病吗?保健与生活(2019年7期)2019-07-31谷歌禁止加密货币应用程序中国计算机报(2018年30期)2018-11-12童梦小资CHIC!ELEGANCE(2018年33期)2018-11-08TEXTURE ON TEXTURE质地上的纹理Coco薇(2017年8期)2017-08-03加密与解密课堂内外(小学版)(2017年5期)2017-06-07第四届20强+1实景家装节开幕中外会展(2016年10期)2016-11-29宝马首次在中国实景演示高度自动驾驶技术汽车之友(2016年15期)2016-08-23消除凹凸纹理有妙招!Coco薇(2015年5期)2016-03-29