赵新宇,汪文涛,张丽丽,夏宏兵
(蚌埠学院 电子与电气工程学院,安徽蚌埠,233030)
可重构机器人由多个标准模块组合而成,能够根据任务或环境的变化而增删模块以改变自身构形来适应地形完成传统机器人无法完成的复杂任务。由于其具有构形重建,成本低廉,通用性等优势,近年来它在精密制造、灾难救援、高温/压环境等场景中发挥着重大作用[1]。
但长期工作在此类复杂恶劣的环境中,系统发生故障的可能性日益频繁,尤其是执行器故障问题,若不能有效地及时处理,系统整体的性能将会受到严重影响,同时也会带来经济财产损失。近年来专家学者们提出了很多关于执行器发生故障的容错控制方案,以提高系统的可靠性。文献[2],设计一种鲁棒预测切换控制方案,解决了工业过程中经常发生的未知扰动、不确定性的执行器随机故障问题。尽管诸如此类的方法使得系统具有良好的控制性能和稳定性能,但忽略了容错控制系统的最优性能指标,即有效的简化控制器的结构设计和减少控制输入的代价消耗。针对此类容错优化问题,往往采用自适应动态规划(ADP)算法进行求解,以获取系统的近似最优解。
ADP作为一种智能控制算法,被广泛应用于各领域中[3-4],由于其可以有效解决最优控制问题且不产生“维数灾”现象。但在容错控制方面,相关的研究方案较少。文献[5]利用在线补偿技术,结合名义控制器与反馈控制器提出了一种故障补偿控制策略。
值得指出的是,这些方案[5]大多都是利用补偿控制技术,而该技术实际也是被动容错的一种范畴。自适应观测器是一种有效实现主动容错的技术手段,可以在线估计故障信息值,并反馈给控制器进行容错控制,无需进行故障检测与隔离环节,结构设计简单,因此该类方法被广泛应用研究[6]。另一方面,现在的大多研究采用的代价函数都是传统的二次型函数,而如何设计将观测的故障信息考虑到系统的代价函数中,构成一种新型的代价函数,进而迭代求解近似最优控制策略将是我们探索和研究的一个方向。
基于此,本文将观测器技术与ADP算法相结合,针对执行器发生突变故障的可重构机器人系统,为了有效处理故障引起系统的性能衰减,提出一种基于改进代价函数的容错优化控制方法。采用自适应观测器技术,设计一种显含故障值的代价函数。通过构建评价神经网络,利用策略迭代求解HJB方程得到反馈控制律,并结合标称控制律,实现系统的安全优化控制。该方法通过观测器在线估计故障信息,无需进行故障检测与隔离。并通过设计执行器发生突变故障的形式进行了仿真实验验证。

2.1 问题转化

由于HJB方程(8)求解难的特殊性,因此,接下来我们将建立自适应观测器与评价神经网络,进而将容错控制问题转化为最优控制问题处理。
2.2 故障观测器
2.3 评价神经网络

为了验证提出方法是否有效,采用构形A的可重构机器人模型(见文献[5])进行数值实验。

仿真结果如图1~图4所示。图1表示的是设计的故障观测器对执行器故障的在线估计曲线,虚线和实线分别表示故障实际值和估计值。可以看出在系统运行初期,由于神经网络训练需要时间,故两条曲线存在较大偏差,估计值未能及时跟踪上实际值。当t=20s和t=45s时系统发生故障后,由于观测器的持续作用,两条曲线在较短的时间内就可以重叠,说明了所设观测器可以准确的观测故障信号,进而减少传统故障检测方法的故障诊断时间。图2、图3分别反映的是关节1、2的跟踪性能曲线。可以看出,即使系统在两段时间内遭遇故障,系统仍可以良好的运行,且保持系统原有的稳定性能。说明了该方案具有良好的容错性,能够保证系统的安全可靠性。图4是两个关节的控制力矩。

图1 故障估计曲线
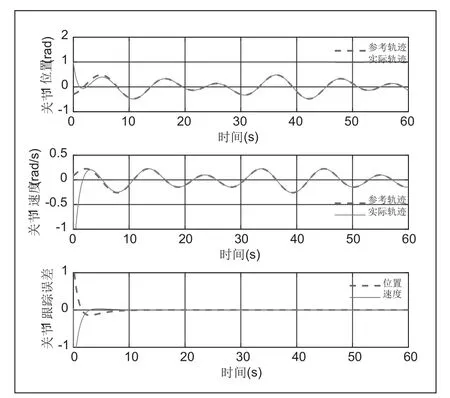
图2 关节1跟踪曲线
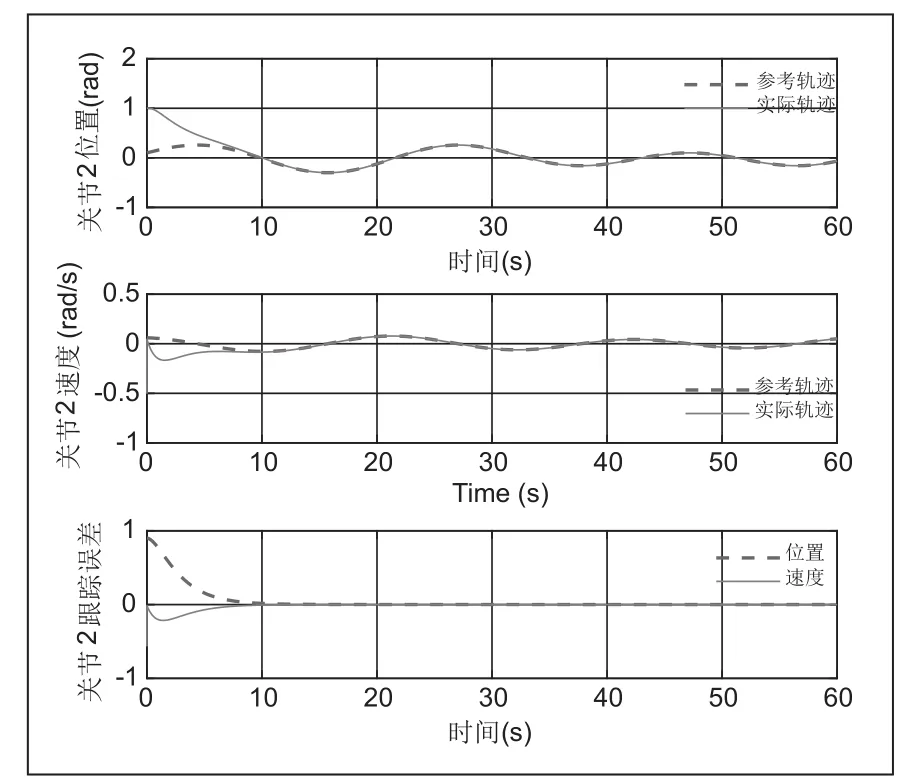
图3 关节2跟踪曲线
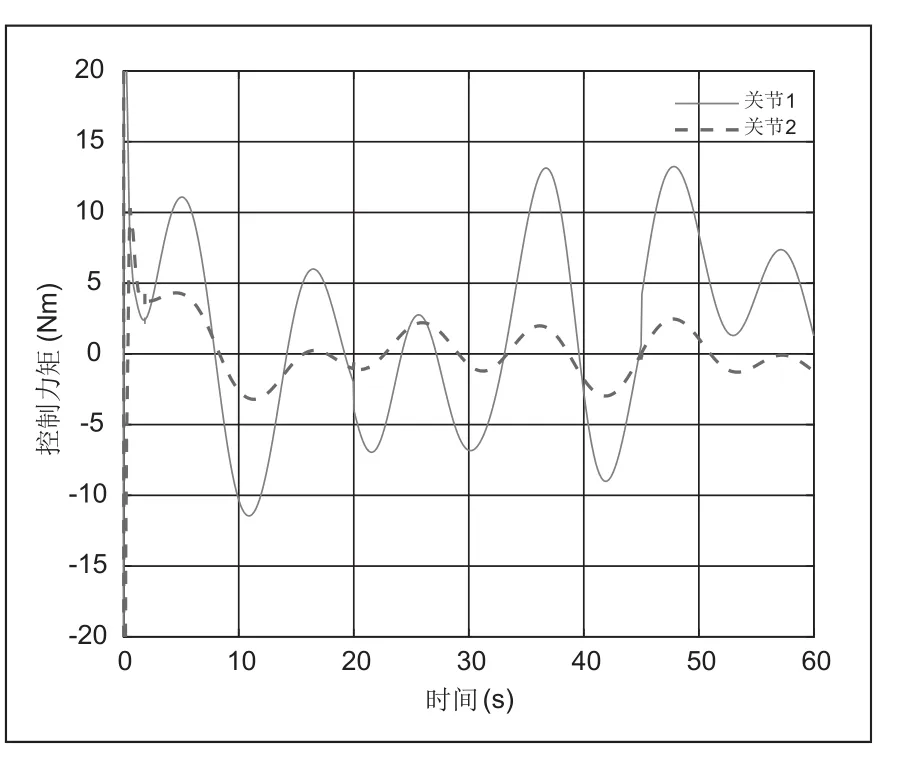
图4 控制力矩
本文融合故障观测器与ADP算法,提出一种容错优化控制方法,有效地解决了系统发生执行器突变故障的控制问题。根据在线观测的故障值,改进传统的二次型代价函数。构建评价神经网络,采用一种新型的自适应学习律近似代价函数,进而求解得到反馈控制律,结合标称控制律,实现系统容错控制。该方法利用观测器技术,规避了传统检测方法的故障检测与隔离过程,大大减少了容错时间。仿真实验表明,该容错方案可以很好地追踪上系统的期望轨迹即使系统发生故障,具有良好的容错性能,能够保证系统的安全可靠性。
猜你喜欢 执行器代价控制器 自动驾驶汽车执行器故障冗余算法汽车实用技术(2022年15期)2022-08-19三转子式比例控制器设计与内泄漏分析舰船科学技术(2022年11期)2022-07-15南京溧水电子3款控制器产品中国自行车(2022年3期)2022-06-30一种软体末端执行结构设计与试验分析机械科学与技术(2022年2期)2022-03-30执行器中磁滞非线性问题的建模和补偿科技风(2021年10期)2021-04-18阀门电动执行器的应用现状及发展趋势科学导报·科学工程与电力(2019年44期)2019-09-10基于NFV的分布式SDN控制器节能机制网络空间安全(2019年8期)2019-03-18幸灾乐祸的代价语文世界(初中版)(2018年10期)2018-11-06幸灾乐祸的代价语文世界(初中版)(2017年5期)2017-06-22代价作文与考试·初中版(2017年12期)2017-04-19